Промышленный робот (ПР) — автоматическая машина, стационарная или подвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций.
Манипулятор — управляемое устройство для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве, оснащенное рабочим органом. Под перепрограммируемостью робота понимается его свойство заменять управляющую программу автоматически или при помощи человека-оператора.
К промышленным роботам с программным управлением относят роботы, управляющая программа которых обладает совокупностью следующих признаков:
- содержит команды исполнительному устройству, относящиеся только к его движениям, непосредственно связанным с выполнением роботом функций согласно его назначению;
- команды исполнительному устройству представляют собой заранее установленные задания, регламентирующие его движения по степеням подвижности;
- последовательность выполнения команд исполнительным устройством является постоянной или изменяется в функции от контролируемых параметров внешней среды.
К промышленным роботам с адаптивным управлением относятся роботы, снабженные измерительными устройствами для восприятия внешней среды, и с управляющей программой, обладающей каким-либо из следующих признаков или их совокупностью:
- содержит команды исполнительному устройству, связанные не только непосредственно с выполнением функций робота согласно назначению, но и с целью приспособления к изменяющимся условиям выполнения технологического процесса (например, обхода нерегулярно появляющихся препятствий);
- содержит команды, определяющие правила формирования заданий, регламентирующих движения исполнительного устройства, по информации о текущем состоянии внешней среды;
- последовательность выполнения команд исполнительному устройству может изменяться в зависимости от состояния внешней среды, идентифицируемого с помощью специальных алгоритмов обработки информации с соответствующих измерительных устройств.
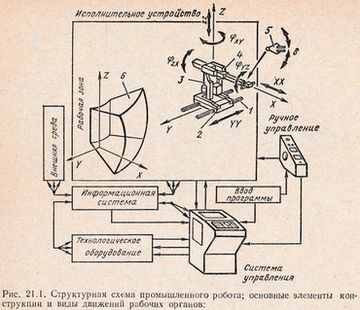
Структурная схема промышленного робота представлена на рис. 21.1.

1— путепровод; 2 — основание; 3 — корпус; 4 — рука; 5 — захватное устройство; 6 — рабочая зона и система координат основных движений робота; XX — направление движения руки вдоль продольной оси; УУ — направление движения корпуса робота по путепроводу; ZZ — направление движения руки вверх-вниз; ϕXY — угол поворота корпуса робота вокруг вертикальной оси Z; ϕZX — угол поворота руки в вертикальной плоскости; ϕYZ — угол поворота захвата относительно оси X; δ — направление движения захвата (зажима) детали; δ и ϕYZ — направление ориентирующих движений; XX, ZZ, ϕXY, ϕZX – направления транспортирующих движений
