Автоматизация производственных процессов может успешно осуществляться только при наличии современных технических средств, создание которых должно базироваться на новейших достижениях науки и техники. К этим средствам автоматики можно отнести датчики, преобразователи, усилители, задающие устройства, исполнительные органы и т. д. Все эти устройства в системах автоматики выполняют ту или иную функцию, связанную с управлением объектом. В зависимости от характера управления, способа решения задач, связанных с управлением, требований, предъявляемых к устройствам, и других характеристик они могут различаться по исполнению и принципу действия.
Рассмотрим некоторые разновидности наиболее распространенных устройств.
Метрологические характеристики датчиков определяют приведенные ниже основные параметры.
Статическая характеристика датчика представляет собой зависимость изменения выходной величины от входной величины, т. е. у = ƒ(х), где х — входная величина; у — выходная величина.
Чувствительность датчика — отношение приращения выходной величины к приращению входной величины, т. е. S = ∆у/∆х. Следовательно, чувствительность датчика есть не что иное, как коэффициент передачи датчика.
Порог чувствительности датчика — наименьшее значение входной величины, которое вызывает появление сигнала на выходе. Этот параметр связан с зоной нечувствительности, т. е. зоной, в пределах которой при наличии входного сигнала на выходе датчика сигнал отсутствует.
Инерционность датчика — время, в течение которого выходная величина принимает значение, соответствующее входной величине.
По характеру получения сигнала от измеряемой величины датчики разделяют на параметрические, в которых изменение измеряемой величины вызывает изменение какого-либо параметра (например, изменение сопротивления, давления, индуктивности и т. д.), и генераторные, у которых изменение измеряемой величины вызывает генерацию сигнала (появление термо-ЭДС, фототока и т. д.). Генераторные датчики не требуют постороннего источника энергии.
По характеру зависимости выходного сигнала от входного различают датчики: пропорциональные, у которых сигнал на выходе пропорционален измеряемой величине; нелинейные, у которых сигнал на выходе нелинейно зависит от сигнала на входе; релейные, в которых сигнал на выходе изменяется скачкообразно; циклические, у которых сигнал на выходе пропорционален измеряемой величине или нелинейно зависит и повторяется циклически; импульсные, у которых изменение входной величины вызывает появление сигналов (импульсов), число которых пропорционально измеряемой величине. Схемы включения измерительных и преобразовательных элементов датчика могут быть дифференциальные, компенсационные, мостовые и т. д.
По виду преобразования сигналов датчики могут быть: электроконтактные, где механическая сила преобразуется в электрический сигнал; индуктивные, у которых изменение магнитной проницаемости вызывает изменение индуктивности; фотоэлектрические, в которых световой сигнал преобразуется в электрический; тензометрические, в которых механическая сила вызывает изменение сопротивления; гидравлические, в которых механические силы преобразуются в гидравлический сигнал, и т. д.
По назначению в системах автоматического управления датчики можно разделить на датчики пути и положения, скорости, силовые, углового положения или угла рассогласования и т. д. Так как датчики можно рассматривать как составные элементы систем управления, удобнее их классифицировать по назначению.
Датчики пути и положения рабочих органов обеспечивают создание управляющих сигналов в зависимости от пройденного пути или положения рабочих органов управляемого объекта.
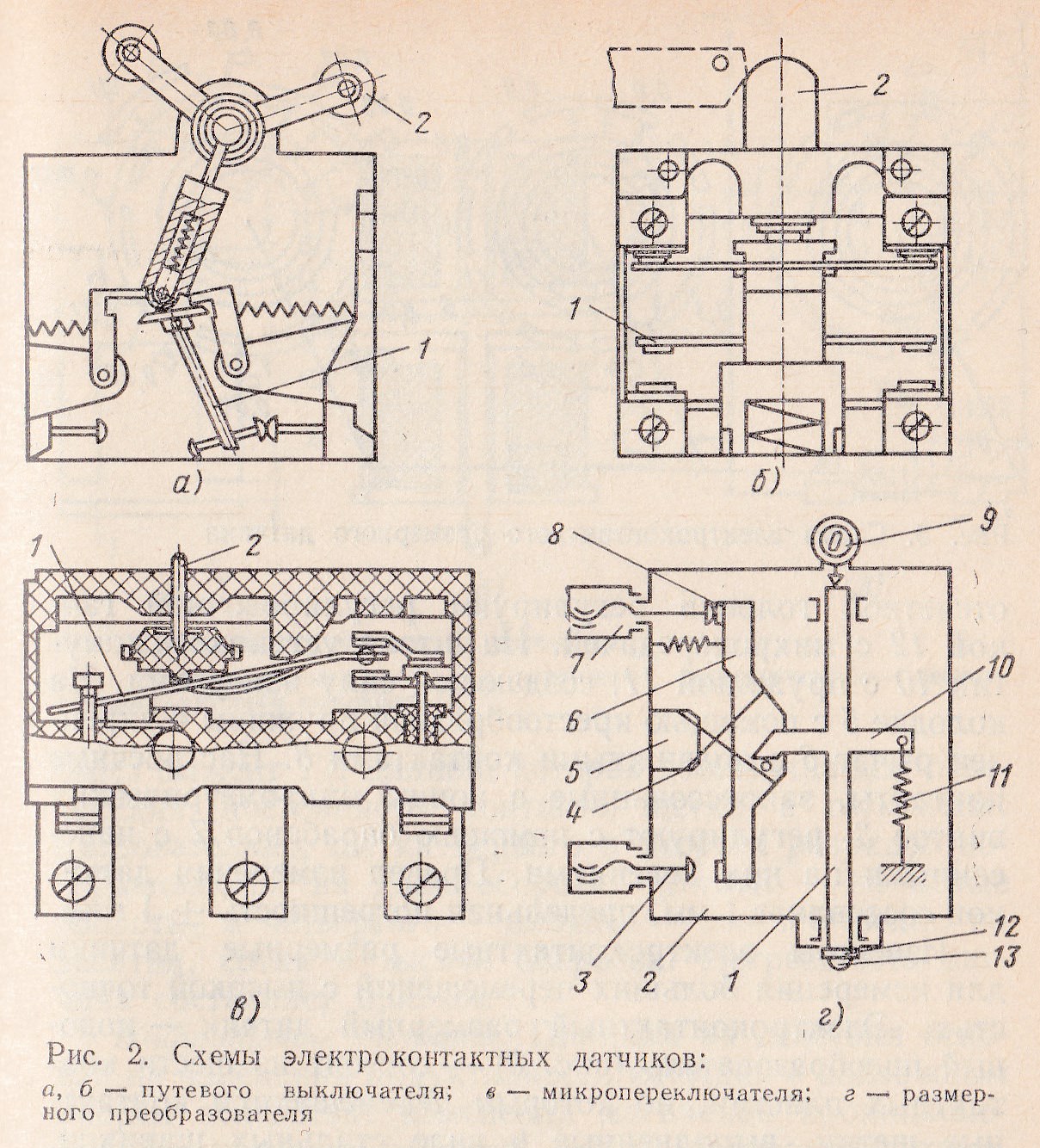 Электроконтактные датчики представляют собой конечные, путевые выключатели, микропереключатели (рис. 2). У датчиков имеются штоки или рычаги 2, которые воздействуют через механизм передачи на контакты 1. Принцип действия датчиков основан на том, что их устанавливают на неподвижных частях рабочих органов в определенном положении, а движущиеся рабочие органы, на которых укреплены кулачки, достигнув заданного положения, воздействуют на датчики, вызывая их срабатывание.
Электроконтактные датчики представляют собой конечные, путевые выключатели, микропереключатели (рис. 2). У датчиков имеются штоки или рычаги 2, которые воздействуют через механизм передачи на контакты 1. Принцип действия датчиков основан на том, что их устанавливают на неподвижных частях рабочих органов в определенном положении, а движущиеся рабочие органы, на которых укреплены кулачки, достигнув заданного положения, воздействуют на датчики, вызывая их срабатывание.
Имеются также электроконтактные размерные датчики (предельные или амплитудные), которые, как и путевые, являются датчиками перемещений. Применяют одно- и многопредельные датчики. Двухпредельный датчик рычажного типа (рис. 2, г) состоит из корпуса 2, в котором расположен измерительный шток 1 в цилиндрических втулках. На штоке установлен наконечник 13 для контактирования с измеряемой деталью. Сверху в корпусе имеется отверстие, в которое устанавливают отсчета у ю головку 9. Положение стрелки отсчетной головки регулируют регулировочной гайкой 12 с микропередачей. На штоке установлен хомутик 10 с пружиной 11, создающей силу измерения. На колодке 5 с помощью крестообразной пружины 4 укреплен рычаг 6 с подвижными контактами 8. Настроечные контакты, запрессованные в концы микрометрических винтов 3, регулируют с помощью барабанов 7 с нанесенными на них делениями. Предел измерения датчиков составляет 1 мм, предельная погрешность ± 1 мкм.
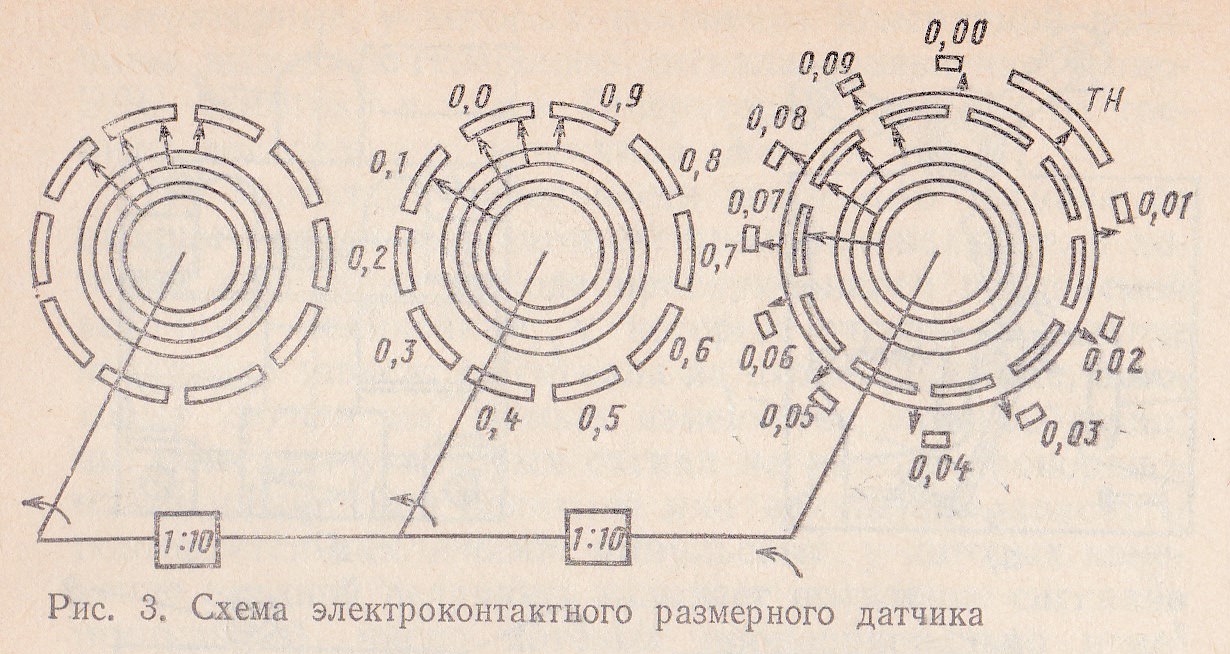 Известны электроконтактные размерные датчики для измерения больших перемещений с высокой точностью. Электроконтактный размерный датчик — кодовый преобразователь (рис. 3) — состоит из шести контактных пластин, по которым перемещаются контактные щетки, выполненные в виде стальных шариков, свободно вращающихся в стальных втулках с прижимными пружинами. Щетки смонтированы на валах, соединенных между собой зубчатой передачей с передаточным отношением 1:10. Для предотвращения изнашивания щеток и контактных пластин служит электромагнит, который отводит щетки при большой частоте вращения входного вала (во время перемещения на большие расстояния).
Известны электроконтактные размерные датчики для измерения больших перемещений с высокой точностью. Электроконтактный размерный датчик — кодовый преобразователь (рис. 3) — состоит из шести контактных пластин, по которым перемещаются контактные щетки, выполненные в виде стальных шариков, свободно вращающихся в стальных втулках с прижимными пружинами. Щетки смонтированы на валах, соединенных между собой зубчатой передачей с передаточным отношением 1:10. Для предотвращения изнашивания щеток и контактных пластин служит электромагнит, который отводит щетки при большой частоте вращения входного вала (во время перемещения на большие расстояния).
Для младшего разряда применено десять щеток, соединенных друг с другом и расположенных на нониусной шкале, что позволяет делить окружность при наличии 10 щеток и контактных пластин на 100 делений (разрешающая способность младшего разряда). Подвод тока к щеткам младшего разряда производится через сегмент ТН длиной, которая достаточна для обеспечения постоянного контакта щетки с сегментом. Следовательно, щетки первого и второго разрядов поворачиваются на доли оборота, третьего — на целые обороты, а четвертого — шестого — соответственно на десятки, сотни и тысячи оборотов. Погрешность датчика составляет 0,05 мм.
Индуктивные датчики. Принцип их действия основан на изменении индуктивности катушки с подвижным якорем вследствие изменения магнитной проницаемости. Индуктивные датчики, как и электроконтактные, можно использовать как датчики пути или положения и как размерные (рис. 4). Если перемещать якорь 1 (рис. 4, а) датчика, воздушный зазор б будет изменяться, что вызовет изменение индуктивности обмотки ωД. Сила тока в цепи обмотки датчика:![]()
где Z — полное сопротивление цепи; UП — напряжение питания датчика; R — активное сопротивление цепи; ХL = 2πƒL. — индуктивное сопротивление обмотки.
Если UП, R, ƒ постоянны, то сила тока I в катушке, а, следовательно, и напряжение U будут пропорциональны воздушному зазору б, т. е. U ≡ I ≡ kδ. Датчики работают при частоте питающей сети 50—5000 Гц.
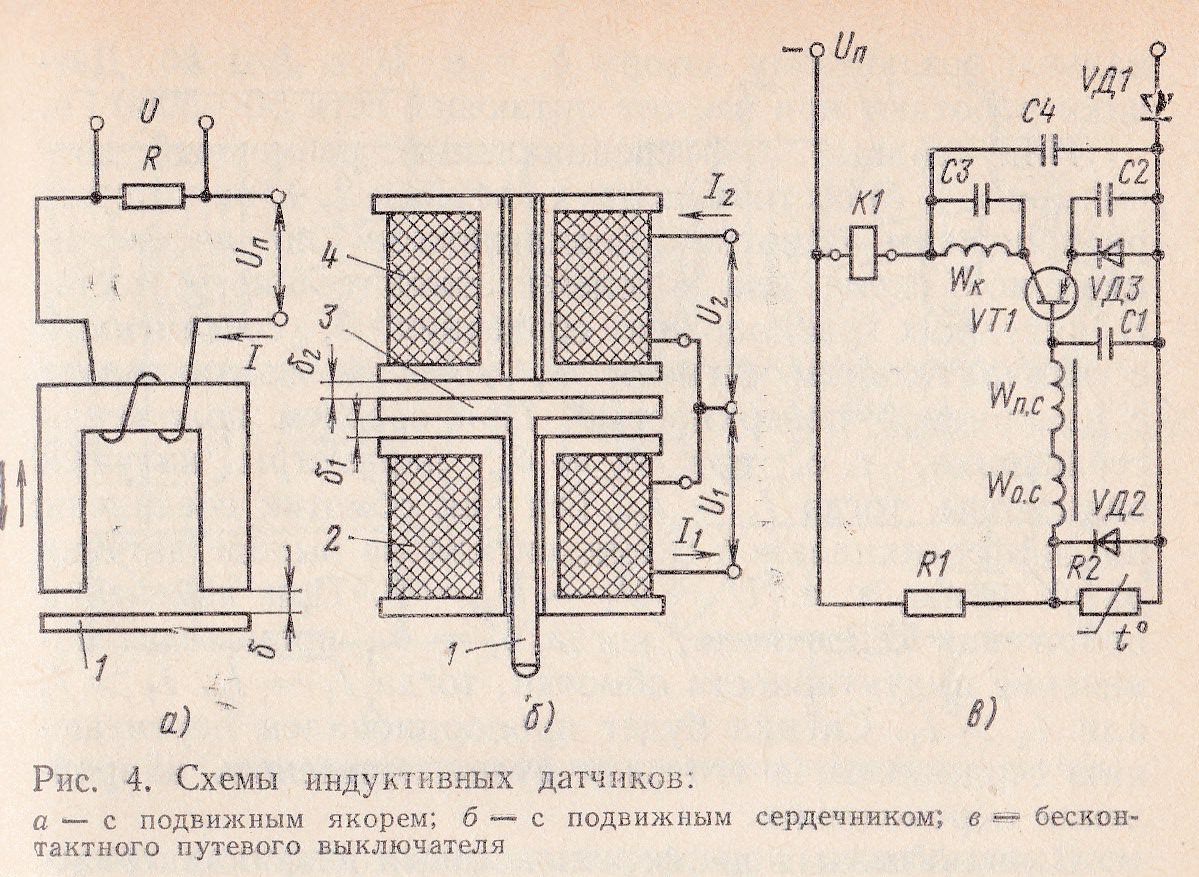 Индуктивный дифференциальный размерный датчик (рис. 4, 6) состоит из двух катушек 2, 4, на которых расположены обмотки, подключаемые по дифференциальной схеме или в плечи измерительного моста. В катушках расположен сердечник 3, соединенный с измерительным штоком 1, который контактирует с измеряемой поверхностью. При среднем положении сердечника, т. е. при δ1 = δ2, параметры катушек одинаковы, тогда I1 — I2. Так как обмотки соединены по дифференциальной схеме, сигнал на выходе датчика равен нулю, г. е. U = U1 — U2 = 0. При изменении положения сердечника, когда δ1 = δ2, происходит изменение индуктивности обмотки, тогда I1 = I2, I1 > I2или I2 > I1. Сигнал будет пропорционален перемещению сердечника, а его знак будет определять направление перемещения.
Индуктивный дифференциальный размерный датчик (рис. 4, 6) состоит из двух катушек 2, 4, на которых расположены обмотки, подключаемые по дифференциальной схеме или в плечи измерительного моста. В катушках расположен сердечник 3, соединенный с измерительным штоком 1, который контактирует с измеряемой поверхностью. При среднем положении сердечника, т. е. при δ1 = δ2, параметры катушек одинаковы, тогда I1 — I2. Так как обмотки соединены по дифференциальной схеме, сигнал на выходе датчика равен нулю, г. е. U = U1 — U2 = 0. При изменении положения сердечника, когда δ1 = δ2, происходит изменение индуктивности обмотки, тогда I1 = I2, I1 > I2или I2 > I1. Сигнал будет пропорционален перемещению сердечника, а его знак будет определять направление перемещения.
В индуктивных дифференциальных датчиках трансформаторного типа при изменении положения сердечника (плунжера) меняется взаимоиндукция между первичной и вторичной обмотками, что вызывает во вторичных обмотках изменение индуцируемой ЭДС.
Бесконтактный щелевой индуктивный датчик БВК (рис. 4, в) имеет два ферритовых сердечника с расположенными на них обмотками. Сердечники и все элементы датчика, кроме реле К1, размещены в капроновом корпусе. На одном сердечнике расположены контурная обмотка WК и обмотка положительной обратной связи WП.С, на другом сердечнике — обмотка отрицательной обратной связи WО.С.
Такой магнитопровод исключает влияние посторонних магнитных полей. Обмотки обратной связи включены последовательно и навстречу друг другу. Значение коэффициента связи таково, что колебания в контуре WК — СЗ не возникают.
При введении в зазор алюминиевого экрана, который несет на себе движущийся рабочий орган, связь между обмотками WК и WО.С ослабевает, и возникает генерация. В контуре WК — СЗ появляется переменный ток, который индуцирует ЭДС в катушке WП.С. В цепи базы транзистора VТ1 происходит детектирование переменной составляющей тока базы. Транзистор открывается, вызывая срабатывание реле K1. Для стабилизации работы транзистора при колебаниях температуры и напряжения служит нелинейный делитель напряжения, состоящий из линейного элемента — резистора R1, полупроводникового терморезистора R2 и диода VD2. Погрешность срабатывания составляет 1—1,3 мм. В промышленности применяют также другие бесконтактные переключатели, которые различаются конструктивным решением или схемой преобразования сигнала.
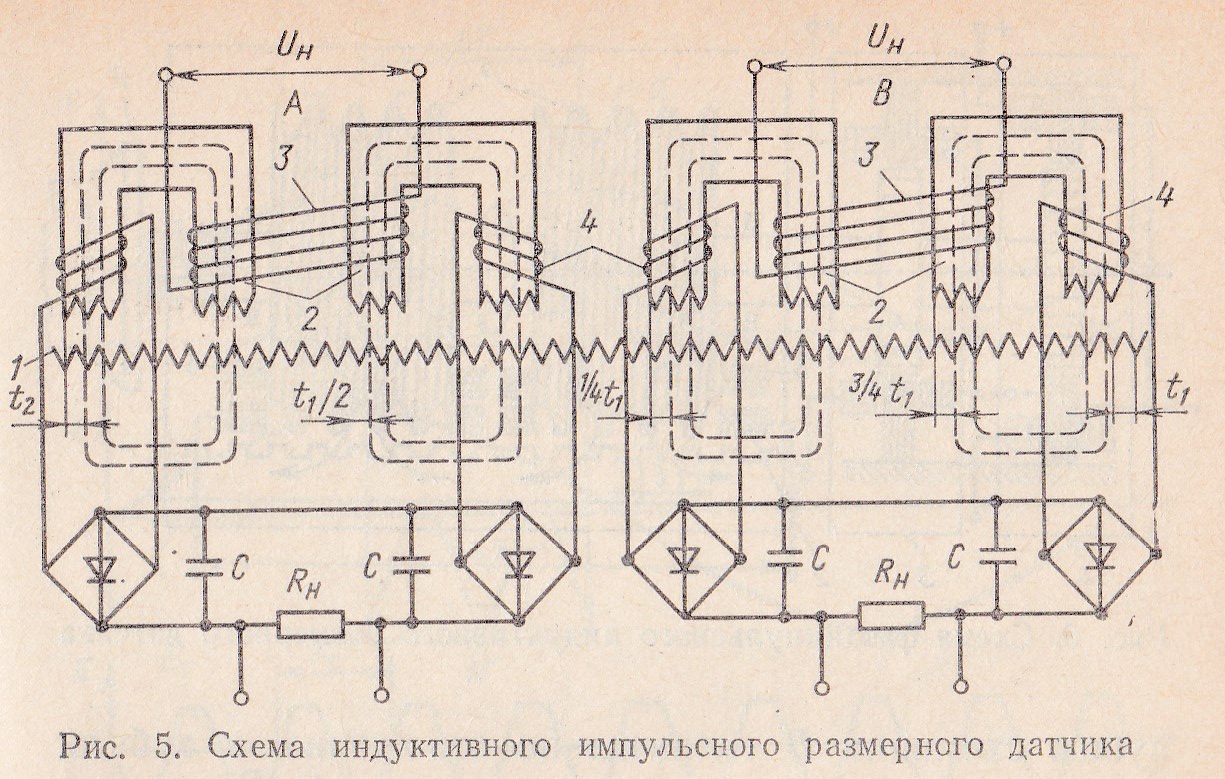 Индуктивные импульсные размерные датчики получили довольно широкое распространение для измерения линейных перемещений. Датчик (рис. 5) состоит из стальной зубчатой шкалы 1 с шагом зубцов t1 и двух съемников A и В, каждый из которых включает в себя два П-образных сердечника 2 с зубцами на торцах (шаг t2). Зубцы одного сердечника каждого съемника смещены по отношению к зубцам другого сердечника на половину шага t1. В каждом съемнике имеется общая первичная обмотка 3 и две разделенные вторичные обмотки 4, которые включены так, что постоянные составляющие токов вычитаются друг из друга.
Индуктивные импульсные размерные датчики получили довольно широкое распространение для измерения линейных перемещений. Датчик (рис. 5) состоит из стальной зубчатой шкалы 1 с шагом зубцов t1 и двух съемников A и В, каждый из которых включает в себя два П-образных сердечника 2 с зубцами на торцах (шаг t2). Зубцы одного сердечника каждого съемника смещены по отношению к зубцам другого сердечника на половину шага t1. В каждом съемнике имеется общая первичная обмотка 3 и две разделенные вторичные обмотки 4, которые включены так, что постоянные составляющие токов вычитаются друг из друга.
Для того чтобы получить, электрический сигнал, меньший, чем шаг t1 и краткий ему, зубцы на съемниках нанесены с шагом t2, который меньше шага t1 и кратен ему. Для определения направления движения зубцы съемника В смещены по отношению к зубцам съемника А на четверть исходного шага t1. Благодаря такому смещению удается также получить цену импульса, равную четверти шага t1. Датчик питается током частотой 20—25 кГц, что обеспечивает нормальную работу на любых скоростях. Датчики изготовляют с ценой импульса 0,05 и 0,02 мм. Имеются также индуктивные датчики такого типа, где вместо зубчатой шкалы применен стальной винт, а сердечники съемников выполнены в виде полугаек. При поступательном движении полугаек относительно винта или при вращении винта периодически меняется магнитное сопротивление зазора, что приводит к изменению ЭДС в обмотках датчика.
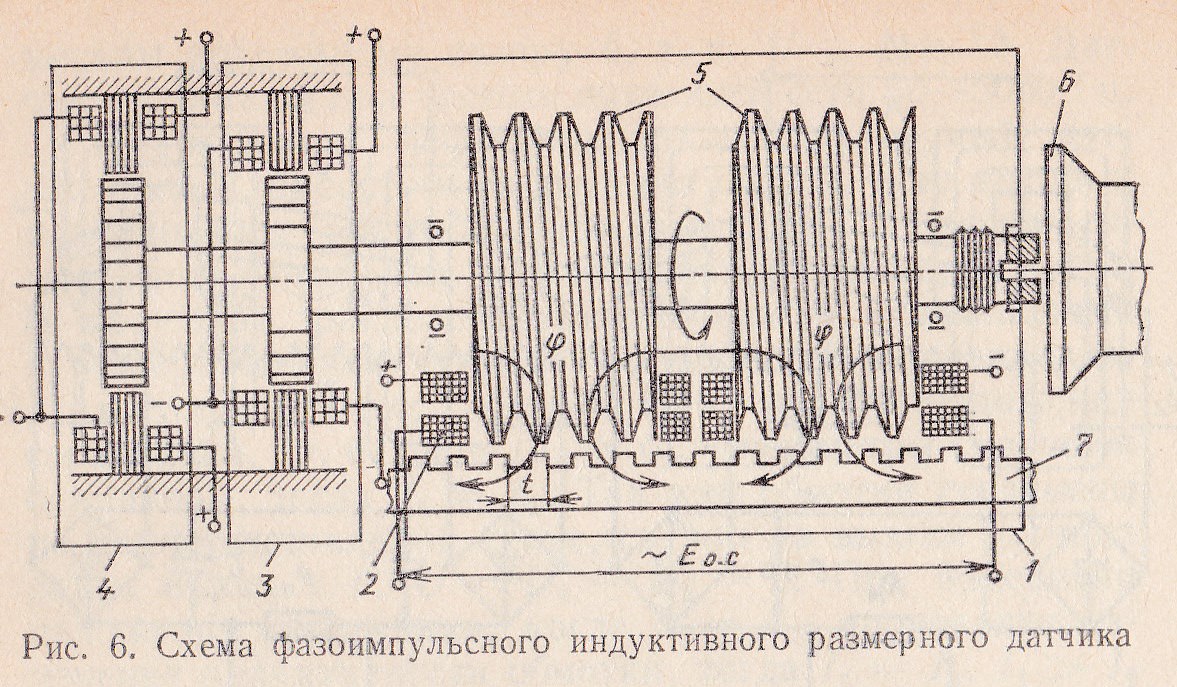 Фазоимпульсный индуктивный размерный датчик ДЛМ (рис. 6) состоит из основного 1, опорного 3 и тактирующего 4 датчиков. Основной сигнал ЕОС датчика вырабатывается за счет периодической модуляции магнитного потока Ф, создаваемого намагничивающими катушками 2 в магнитной системе, образованной винтами 5 с шагом 5 и зубчатой рейкой 7. Периодическая модуляция потока Ф происходит благодаря периодическому изменению конфигурации зазора между боковой поверхностью винтов и зубчатой рейкой при непрерывном вращении винта, который приводится в движение синхронным двигателем 6. При этом на вторичных обмотках датчика наводится ЭДС ЕО.С. При смещении зубчатой рейки, которая закреплена на движухцемся рабочем органе, на расстояние АЬ основной сигнал смещается во времени, что будет соответствовать сигналу Е`ОС (рис. 7). Для определения начальной фазы основного сигнала служит круговой магнитный зубчатый преобразователь 3 (см. рис. 6), который вырабатывает сигнал Е0, не зависящий от положения зубчатой рейки.
Фазоимпульсный индуктивный размерный датчик ДЛМ (рис. 6) состоит из основного 1, опорного 3 и тактирующего 4 датчиков. Основной сигнал ЕОС датчика вырабатывается за счет периодической модуляции магнитного потока Ф, создаваемого намагничивающими катушками 2 в магнитной системе, образованной винтами 5 с шагом 5 и зубчатой рейкой 7. Периодическая модуляция потока Ф происходит благодаря периодическому изменению конфигурации зазора между боковой поверхностью винтов и зубчатой рейкой при непрерывном вращении винта, который приводится в движение синхронным двигателем 6. При этом на вторичных обмотках датчика наводится ЭДС ЕО.С. При смещении зубчатой рейки, которая закреплена на движухцемся рабочем органе, на расстояние АЬ основной сигнал смещается во времени, что будет соответствовать сигналу Е`ОС (рис. 7). Для определения начальной фазы основного сигнала служит круговой магнитный зубчатый преобразователь 3 (см. рис. 6), который вырабатывает сигнал Е0, не зависящий от положения зубчатой рейки.
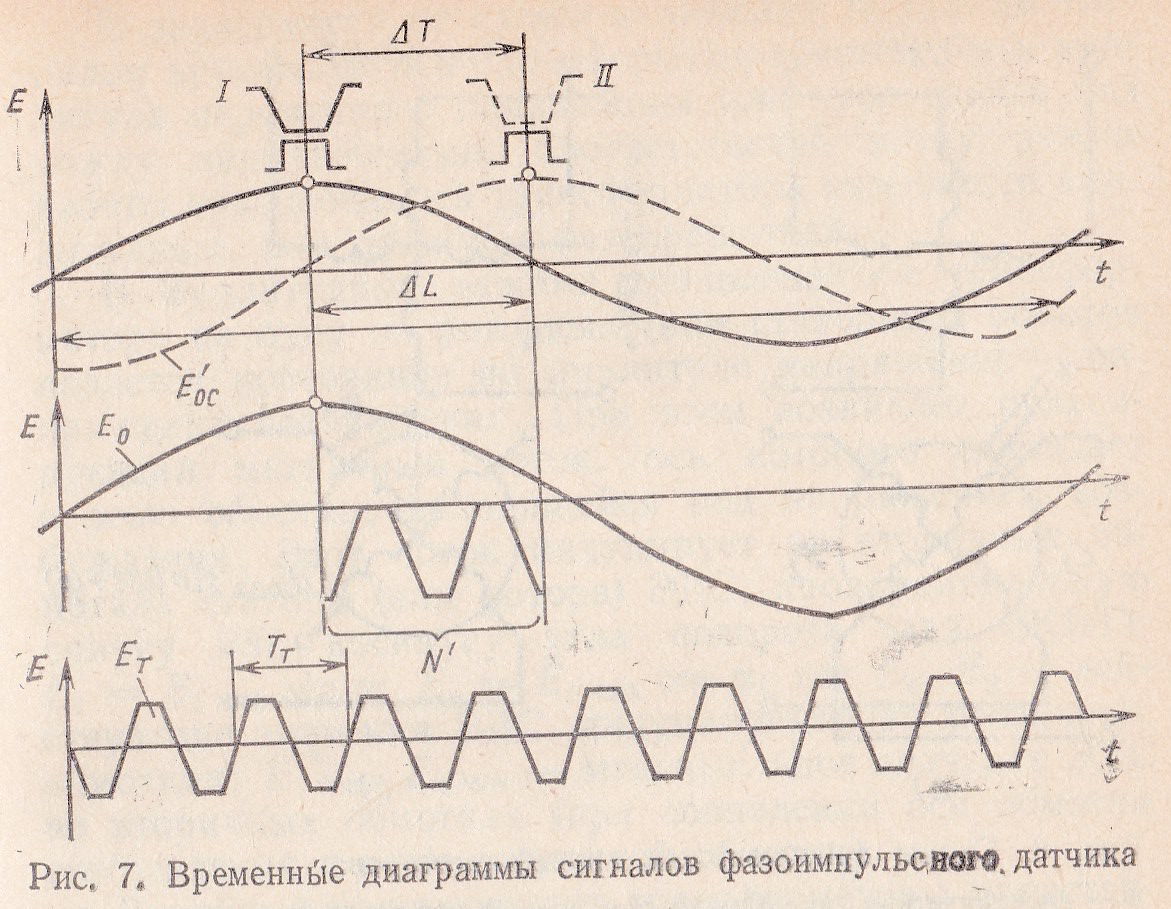 Для измерения фазового сдвига основного сигнала ЕОС относительно опорного ЕО определенным числом импульсов служит круговой магнитный зубчатый преобразователь 4 (тактирующий датчик). Ротор его укреплен на общей оси; сигнал этого преобразователя (тактирующий) ЕT имеет период, в 50 раз меньший периода основного и опорного сигналов, и жестко привязан по времени к опорному сигналу. Поэтому фазовый сдвиг между основным и опорным сигналом ∆ϕ = (360°/100) n, где 100 — число периодов тактового датчика при одном периоде опорного сигнала; n — число полупериодов тактового сигнала.
Для измерения фазового сдвига основного сигнала ЕОС относительно опорного ЕО определенным числом импульсов служит круговой магнитный зубчатый преобразователь 4 (тактирующий датчик). Ротор его укреплен на общей оси; сигнал этого преобразователя (тактирующий) ЕT имеет период, в 50 раз меньший периода основного и опорного сигналов, и жестко привязан по времени к опорному сигналу. Поэтому фазовый сдвиг между основным и опорным сигналом ∆ϕ = (360°/100) n, где 100 — число периодов тактового датчика при одном периоде опорного сигнала; n — число полупериодов тактового сигнала.
Учитывая, что полный период изменения фазы соответствует перемещению на один шаг зубчатой меры, равному 1 мм, перемещение ∆L может быть определено числом полупериодов тактового сигнала, т. е. ∆L = (1 мм/100) n, где n — 1, 2, 3, …,100. Минимальное значение перемещения, которое может быть зарегистрировано (дискрета), соответствует n = 1, поэтому i = 1 мм/100 = 0,01 мм.
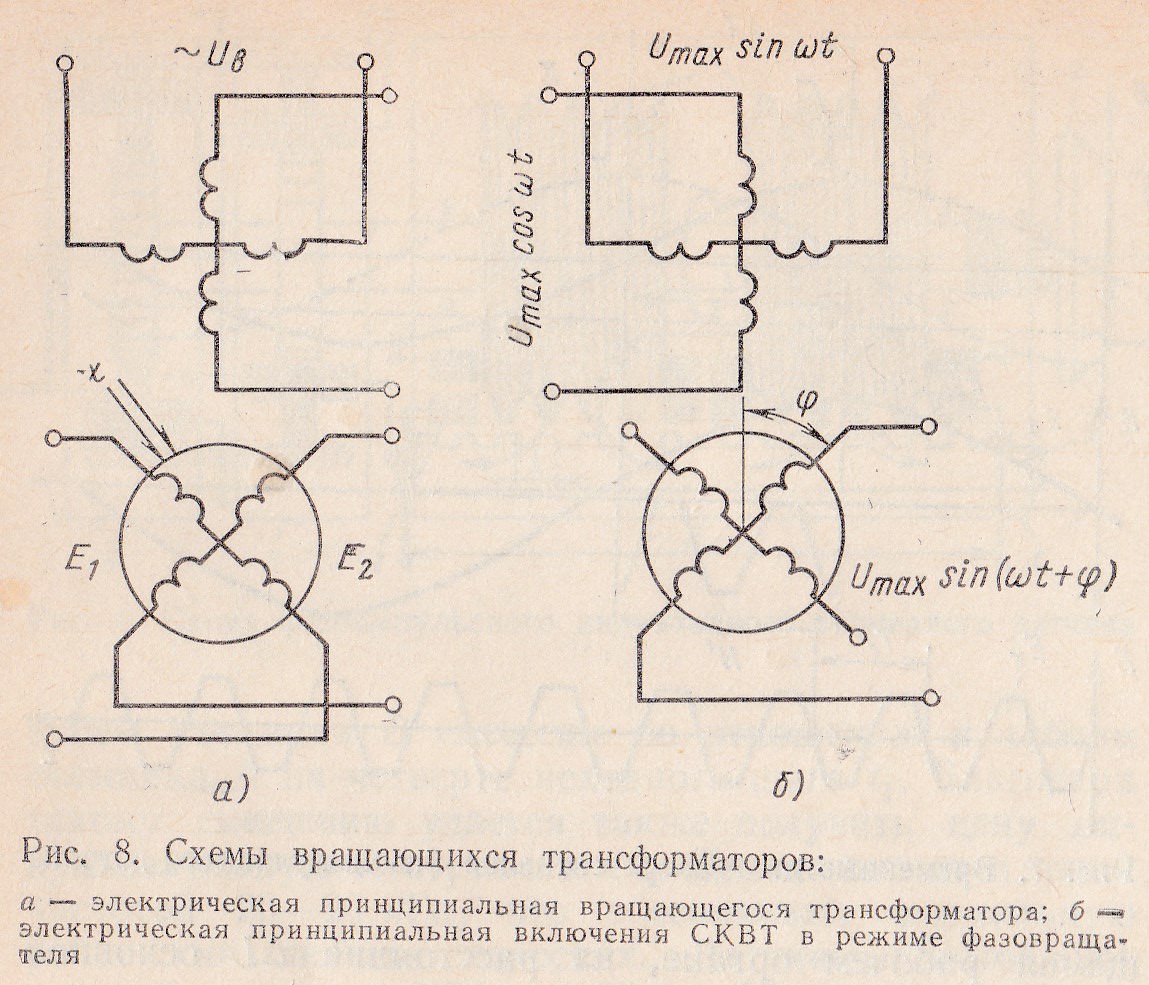 Вращающиеся (поворотные) трансформаторы. На статоре и роторе вращающегося трансформатора размещены по две распределенные обмотки, магнитные оси которых взаимно перпендикулярны (рис. 8, й). Ротор вращающегося трансформатора может поворачиваться на некоторый угол, произвольный по отношению к статору.
Вращающиеся (поворотные) трансформаторы. На статоре и роторе вращающегося трансформатора размещены по две распределенные обмотки, магнитные оси которых взаимно перпендикулярны (рис. 8, й). Ротор вращающегося трансформатора может поворачиваться на некоторый угол, произвольный по отношению к статору.
Принцип действия вращающегося трансформатора основан на изменении коэффициентов взаимоиндукции между обмотками статора и ротора при повороте ротора. В качестве датчиков угла используют синуснокосинусные вращающиеся трансформаторы (СКВТ), у которых зависимость коэффициентов взаимоиндукции от угла поворота ротора носит характер синусоиды и косинусоиды, и линейные вращающиеся трансформаторы (ЛВТ), у которых указанная зависимость линейная.
В зависимости от схемы включения выходным сигналом вращающегося трансформатора может быть амплитуда переменного напряжения или угол сдвига фаз между напряжениями. Соответственно этому режим работы вращающегося трансформатора называется амплитудным, или режимом фазовращателя.
В амплитудном режиме вращающегося трансформатора на одну из роторных (или статорных) обмоток подается постоянное по амплитуде напряжение — напряжение возбуждения. При этом возникает пульсирующий магнитный поток, ось которого совпадает с осью обмотки, находящейся под напряжением возбуждения. Этот поток индуцирует во вторичных обмотках статора (или ротора) ЭДС, пропорциональную синусу или косинусу угла поворота (для СКВТ): E1 = Е1MAXsinα, E2 = Е2MAXcosα, где E1, E2 действующие значения ЭДС, индуцируемой во вторичных обмотках; Е1MAX, Е2MAX— максимальное значение ЭДС во вторичных обмотках (при совпадении оси обмотки возбуждения с осью вторичной обмотки).
Линейные вращающиеся трансформаторы представляют собой синусные вращающиеся трансформаторы, обмотки которых включают по специальной схеме.
В режиме фазовращателя (рис. 8, б) используют СКВТ. Статорные обмотки включаются в систему двух питающих напряжений со сдвигом фаз 90°: U1 = UMAXsinωt, U2 = UMAXcosωt. Благодаря этому возникает круговое вращающееся магнитное поле, которое перемещается в пространстве с угловой частотой ω. При этом в роторных обмотках СКВТ индуцируется ЭДС, имеющая такую же частоту, но сдвинутая по фазе относительно питающего напряжения на угол, который зависит от угла ф поворота ротора СКВТ:![]()
Таким образом, в режиме фазовращателя СКВТ является датчиком, преобразующим угол поворота в фазовый угол синусоидального напряжения.
 Для повышения точности преобразования применяют вращающиеся трансформаторы с электрической редукцией. Принцип электрической редукции заключается в том, что за малый угол поворота ротора амплитуда или фаза выходного напряжения изменяется на один период, а при повороте ротора на 360° число периодов равно коэффициенту электрической редукции. Наибольшее распространение из вращающихся трансформаторов с электрической редукцией получили индукционные редуктосины и индуктосины.
Для повышения точности преобразования применяют вращающиеся трансформаторы с электрической редукцией. Принцип электрической редукции заключается в том, что за малый угол поворота ротора амплитуда или фаза выходного напряжения изменяется на один период, а при повороте ротора на 360° число периодов равно коэффициенту электрической редукции. Наибольшее распространение из вращающихся трансформаторов с электрической редукцией получили индукционные редуктосины и индуктосины.
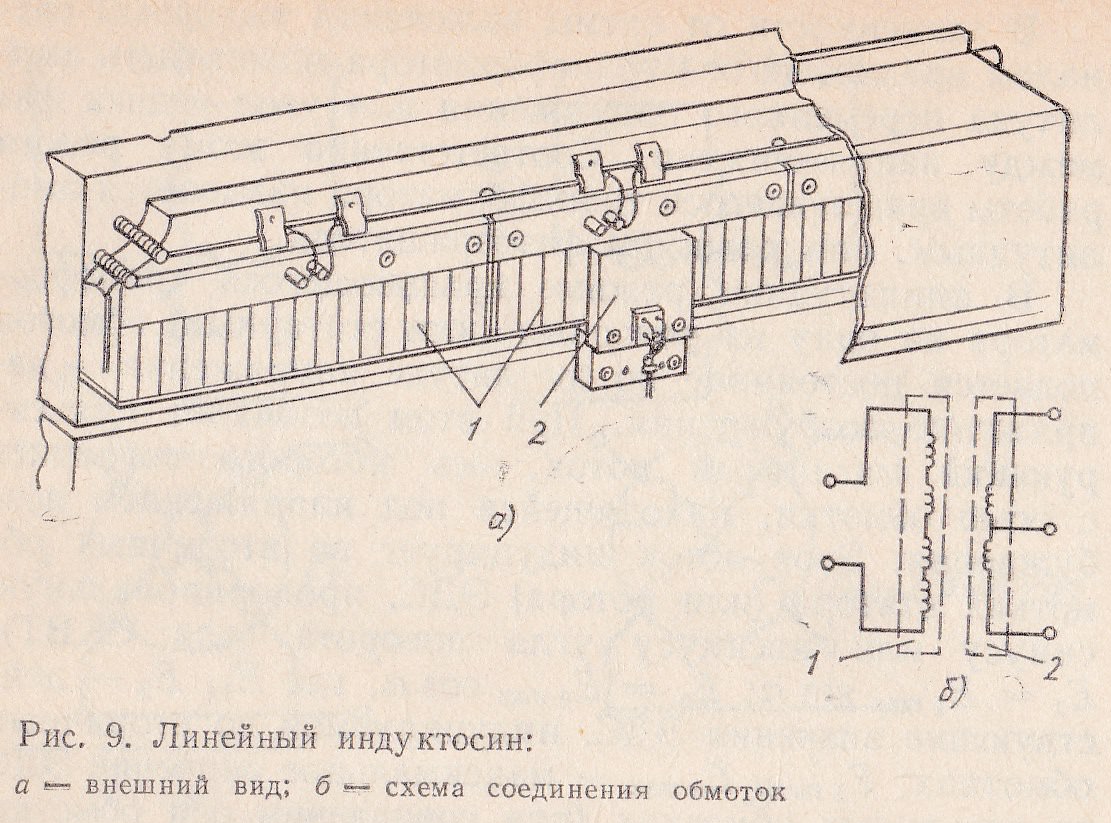
Линейный индуктосин (рис. 9) состоит из набора измерительных шкал 1 и ползуна 2, монтируемых на рабочих органах.
Измерительная шкала индуктосина укреплена на неподвижной части и представляет собой стальную линейку, на которой на соответствующую изолирующую подложку печатным способом нанесена зигзагообразная обмотка с шагом 2 мм. Ползун 2, укрепленный на подвижной части, является якорем и состоит из двух таких же, но более коротких обмоток, сдвинутых на 1/4 шага относительно друг друга. На выходе обмоток якоря индуцируется циклический сигнал. Число циклов определяется числом пройденных шагов. В промышленности применяют также круговые индуктосины.
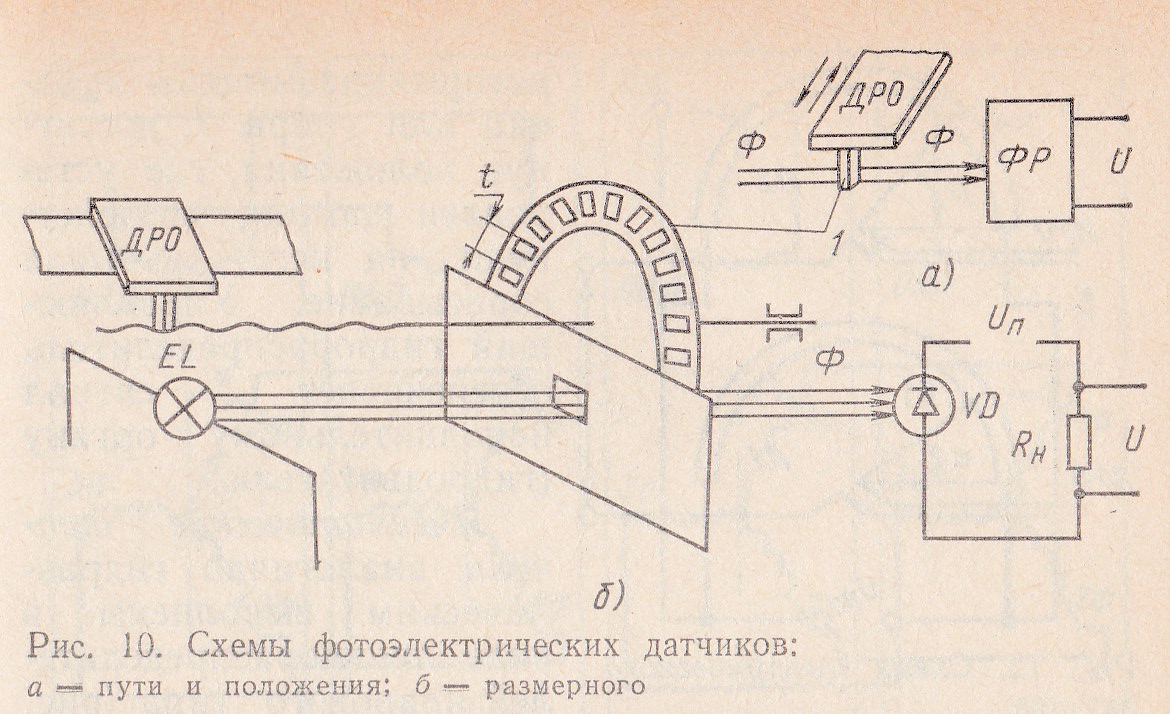 Фотоэлектрические датчики (рис. 10, а) представляют собой обычное фотореле, установленное на рабочих органах в определенном положении. Движущийся рабочий орган (ДРО), переместившись в установленное положение, экраном прерывает поток света Ф, вызывая срабатывание фотореле (ФР). В промышленности применяют также размерные фотоэлектрические датчики. Размерный датчик (рис. 10, б) состоит из диска, который соединен с ДРО. На диске нанесены штрихи или прорези с определенным шагом t. При движении рабочего органа штрихи на диске прерывают световой поток Ф, вызывая срабатывание фотореле. Измеренное перемещение ∆L = nt, где n — число срабатывания фотореле; t — цена деления шага. Имеются датчики, у которых в качестве измерительных шкал применяют линейки с нанесенными штрихами.
Фотоэлектрические датчики (рис. 10, а) представляют собой обычное фотореле, установленное на рабочих органах в определенном положении. Движущийся рабочий орган (ДРО), переместившись в установленное положение, экраном прерывает поток света Ф, вызывая срабатывание фотореле (ФР). В промышленности применяют также размерные фотоэлектрические датчики. Размерный датчик (рис. 10, б) состоит из диска, который соединен с ДРО. На диске нанесены штрихи или прорези с определенным шагом t. При движении рабочего органа штрихи на диске прерывают световой поток Ф, вызывая срабатывание фотореле. Измеренное перемещение ∆L = nt, где n — число срабатывания фотореле; t — цена деления шага. Имеются датчики, у которых в качестве измерительных шкал применяют линейки с нанесенными штрихами.
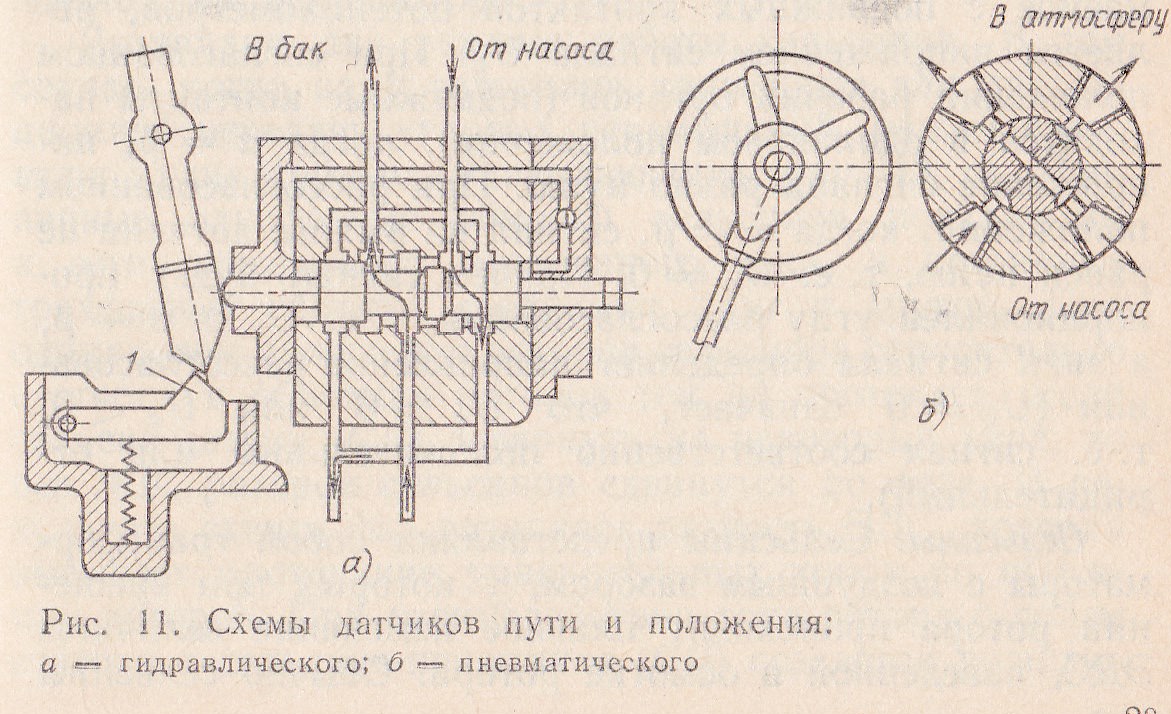 Гидравлические датчики представляют собой обычный управляющий гидрораспределитель поршневого или кранового типа (рис. 11, а). Принцип их действия основан ка том, что движущиеся рабочие органы, на которых размещены кулачки или упоры 1, достигнув положения, где установлен датчик, воздействуют на него, вызывая сбрасывание. Управляющий гидрораспределитель обеспечивает сигнал исполнительному органу (гидродвигателю),
Гидравлические датчики представляют собой обычный управляющий гидрораспределитель поршневого или кранового типа (рис. 11, а). Принцип их действия основан ка том, что движущиеся рабочие органы, на которых размещены кулачки или упоры 1, достигнув положения, где установлен датчик, воздействуют на него, вызывая сбрасывание. Управляющий гидрораспределитель обеспечивает сигнал исполнительному органу (гидродвигателю),
Пневматические датчики аналогично гидравлическим выполнены в виде пневмораспределителей кранового типа (рис. 11, б), дросселей или клапанов. Широкое распространение получили размерные пневматические дифференциальные датчики мембранного и сильфонного типа с электроконтактным выходом.
Датчики углового положения создают управляющий сигнал в зависимости от углового положения или угла рассогласования между рабочими органами.
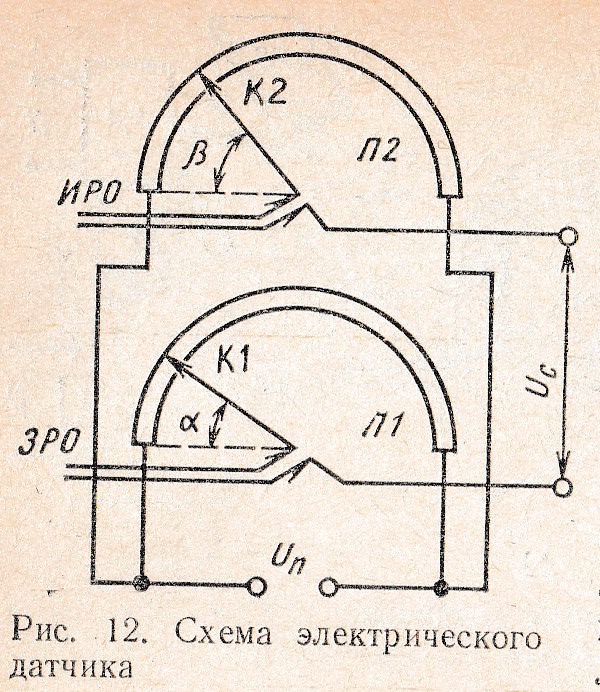 Потенциометрический датчик (рис. 12) состоит из потенциометров П1 и П2, которые подключены параллельно к общему источнику питания UП. Подвижные контакты потенциометров К1, К2 соответственно соединены механически с задающим (ЗРО) и исполнительным (ПРО) рабочими органами. Напряжение, снимаемое с подвижных контактов потенциометров, является напряжением сигнала UC. При согласованном положении рабочих органов (подвижные контакты находятся в одинаковом положении), когда α — β, напряжение сигнала равно нулю. При рассогласованном положении, когда α ≠ β, сигнал на выходе датчика не равен нулю, т. е. UC ≠ 0. Причем сигнал будет пропорционален углу рассогласования, т. е. UC = α — β, а знак сигнала определяет направление рассогласования (UC ≠ 0 означает, что UC > 0 или UC < 0, т. е. сигнал соответственно положительный или отрицательный).
Потенциометрический датчик (рис. 12) состоит из потенциометров П1 и П2, которые подключены параллельно к общему источнику питания UП. Подвижные контакты потенциометров К1, К2 соответственно соединены механически с задающим (ЗРО) и исполнительным (ПРО) рабочими органами. Напряжение, снимаемое с подвижных контактов потенциометров, является напряжением сигнала UC. При согласованном положении рабочих органов (подвижные контакты находятся в одинаковом положении), когда α — β, напряжение сигнала равно нулю. При рассогласованном положении, когда α ≠ β, сигнал на выходе датчика не равен нулю, т. е. UC ≠ 0. Причем сигнал будет пропорционален углу рассогласования, т. е. UC = α — β, а знак сигнала определяет направление рассогласования (UC ≠ 0 означает, что UC > 0 или UC < 0, т. е. сигнал соответственно положительный или отрицательный).
Сельсины. Сельсины представляют собой трансформаторы с воздушным зазором, у которых при вращении ротора происходит плавное изменение величины ЭДС, наведенной в обмотке ротора. Обычно сельсины работают в паре: сельсин, связанный с ведомым валом, называют сельсином-приемником, а сельсин, связанный с ведущим валом, — сельсином-датчиком (рис. 13).
Однофазная обмотка сельсина расположена на статоре, а трехфазная — на роторе. Трехфазная обмотка состоит из трех катушек, сдвинутых относительно друг друга на 120°. Они уложены в пазы ротора и соединены в звезду. Концы фазовых (1ф, 2ф, Зф) обмоток выведены на три контактных кольца, расположенных на валу ротора.
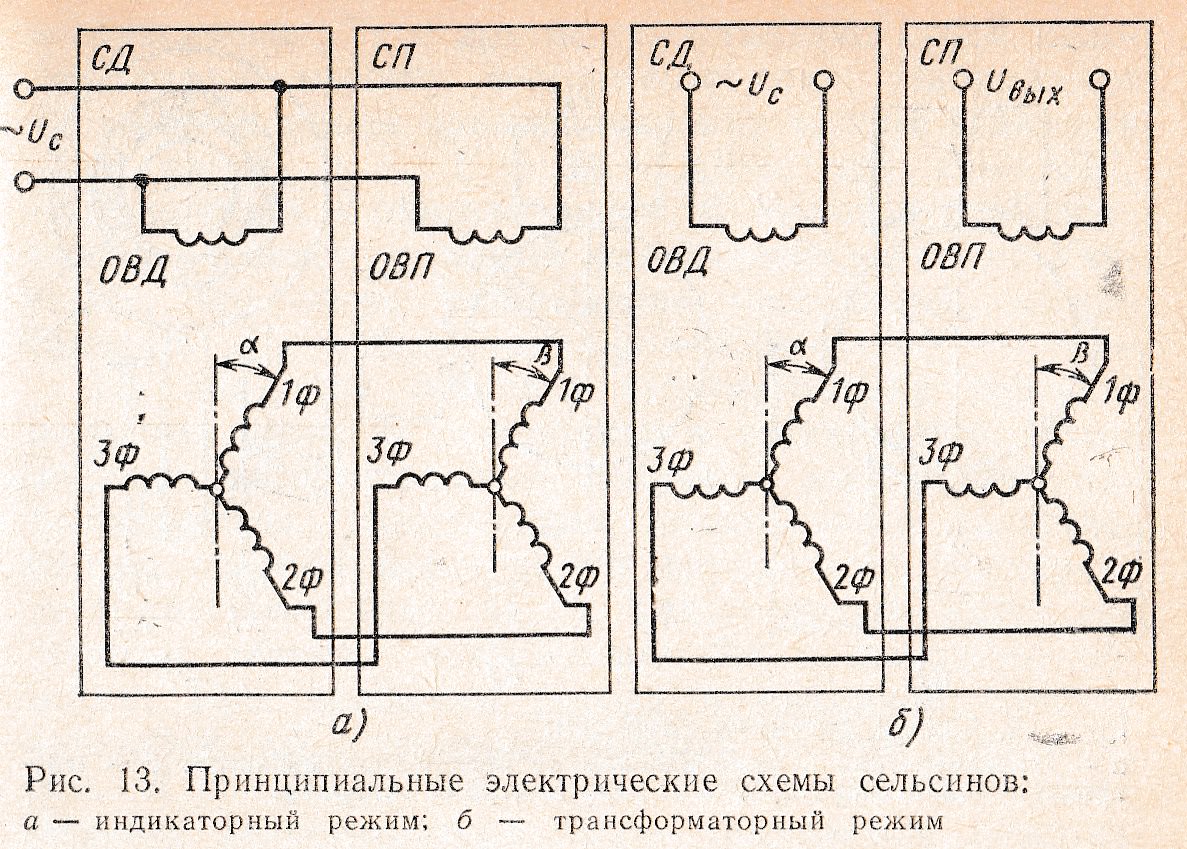 Различают два режима работы сельсинов. В том случае, когда пару сельсинов применяют для дистанционной передачи угловых перемещений, режим называют индикаторным (указывающим) (рис. 13, а). Первичные однофазные обмотки сельсинов подключают к сети однофазного переменного тока, а вторичные трехфазные обмотки соединяют друг с другом. При одинаковом положении роторов сельсинов относительно статоров в обмотках роторов ток не протекает. Если сельсин-датчик (СД) повернуть на некоторый угол, то все ЭДС роторов сельсинов сдвинутся по фазе. В результате сдвига фаз возникает разность ЭДС, которая вызывает протекание уравнительных токов по обмоткам роторов. При взаимодействии тока ротора с полем статора в сельсине-приемнике (СП) создается вращающийся момент, под действием которого ротор сельсина-приемника поворачивается до тех пор, пока вновь не восстанавливается равновесие ЭДС. В результате ротор сельсина-приемника поворачивается на тот же угол, на который был повернут ротор сельсина-датчика.
Различают два режима работы сельсинов. В том случае, когда пару сельсинов применяют для дистанционной передачи угловых перемещений, режим называют индикаторным (указывающим) (рис. 13, а). Первичные однофазные обмотки сельсинов подключают к сети однофазного переменного тока, а вторичные трехфазные обмотки соединяют друг с другом. При одинаковом положении роторов сельсинов относительно статоров в обмотках роторов ток не протекает. Если сельсин-датчик (СД) повернуть на некоторый угол, то все ЭДС роторов сельсинов сдвинутся по фазе. В результате сдвига фаз возникает разность ЭДС, которая вызывает протекание уравнительных токов по обмоткам роторов. При взаимодействии тока ротора с полем статора в сельсине-приемнике (СП) создается вращающийся момент, под действием которого ротор сельсина-приемника поворачивается до тех пор, пока вновь не восстанавливается равновесие ЭДС. В результате ротор сельсина-приемника поворачивается на тот же угол, на который был повернут ротор сельсина-датчика.
Вторым возможным режимом работы сельсинов является трансформаторный (рис. 13, б). В отличие от индикаторного режима в трансформаторном режиме к сети переменного тока подключается только однофазная обмотка сельсина-датчика, а однофазная обмотка сельсина-приемника является выходной: с нее снимается сигнал, пропорциональный углу рассогласования роторов сельсинной пары, и поступает на вход системы следящего привода или исполнительного механизма.
Датчики скорости создают управляющие сигналы в зависимости от скорости. Более широкое распространение в машиностроении получили описанные ниже датчики.
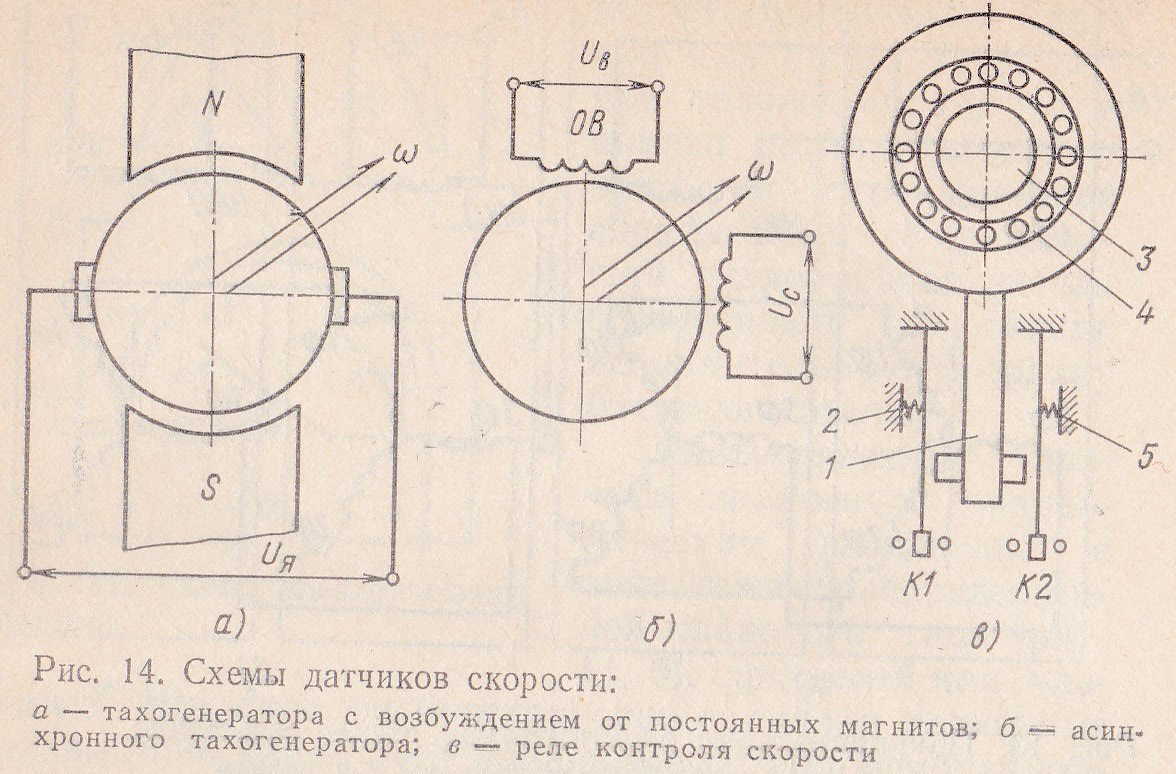 Тахогенераторы служат для измерения частоты вращения. В зависимости от рода тока различают тахогенераторы постоянного и переменного тока. Тахогенераторы постоянного тока разделяют по способу возбуждения на тахогенераторы с возбуждением от постоянных магнитов (рис. 14, а) и с электромагнитным возбуждением. Те и другие представляют собой малогабаритную машину постоянного тока. Напряжение на зажимах якоря пропорционально частоте вращения вала якоря, т. е. Е = UЯ = keФω, где Е — ЭДС, индуцируемая в обмотке якоря; Ф — поток возбуждения; ke— конструктивный коэффициент машины. Учитывая, что поток возбуждения постоянный, можно записать: UЯ = kТГω, где kТГ = keФ.
Тахогенераторы служат для измерения частоты вращения. В зависимости от рода тока различают тахогенераторы постоянного и переменного тока. Тахогенераторы постоянного тока разделяют по способу возбуждения на тахогенераторы с возбуждением от постоянных магнитов (рис. 14, а) и с электромагнитным возбуждением. Те и другие представляют собой малогабаритную машину постоянного тока. Напряжение на зажимах якоря пропорционально частоте вращения вала якоря, т. е. Е = UЯ = keФω, где Е — ЭДС, индуцируемая в обмотке якоря; Ф — поток возбуждения; ke— конструктивный коэффициент машины. Учитывая, что поток возбуждения постоянный, можно записать: UЯ = kТГω, где kТГ = keФ.
По принципу действия тахогенератори переменного тока делят на синхронные и асинхронные. Более широкое распространение получили асинхронные тахогенератори. Конструкция асинхронного тахогенератора подобна конструкции двухфазного асинхронного двигателя (рис. 14, б). Тахогенератор имеет две обмотки: обмотку возбуждения ОБ и выходную обмотку. При вращении ротора в выходной обмотке наводится ЭДС, пропорциональная частоте вращения, т. е. Е = kТГUBω, где kТГ— конструктивный коэффициент тахогенератора; UB — напряжение обмотки возбуждения; ω — частота вращения ротора.
Реле контроля скорости (РКС) (рис. 14, в) состоит из постоянного магнита 3, который находится на валу (сигнал на входе), а также кольца 4, в котором расположена обмотка типа «беличье колесо». На другом валу, соединенном с кольцом, расположен толкатель 1, воздействующий на группу контактов К.1, К2, которые возвращаются в исходное положение под действием пружин 2 и 5. При вращении вала РКС вращающийся магнит наводит в обмотке, расположенной в кольце, ЭДС. Ток, протекая по обмотке, взаимодействует с магнитным потоком вращающегося магнита, в результате создается вращающий момент, который, поворачивая кольцо с толкателем, воздействует на контакты и вызывает их срабатывание.
Силовые датчики обеспечивают создание управляющих сигналов в зависимости от сил, создаваемых в рабочих органах.
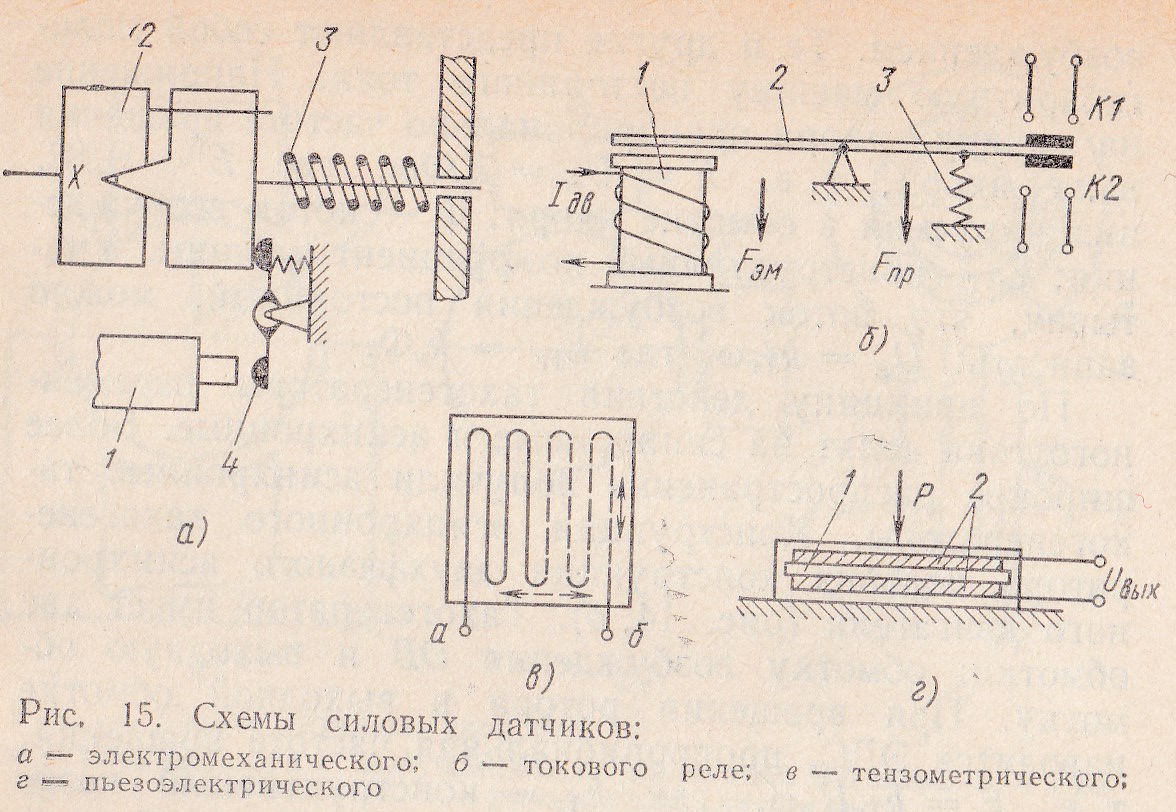 Электромеханические датчики. Один из видов электромеханического силового датчика (рис. 15, а) представляет собой кулачковую муфту 2 со скошенными зубьями, замыкающуюся под действием пружины 3. Одна из полумуфт сидит на валу со скользящей шпонкой. Полумуфта через рычаг 4 воздействует на микропереключатель 1. При возникновении на валу заданных сил сдвинутая полумуфта, воздействуя через рычаг на микровыключатель, вызывает его срабатывание.
Электромеханические датчики. Один из видов электромеханического силового датчика (рис. 15, а) представляет собой кулачковую муфту 2 со скошенными зубьями, замыкающуюся под действием пружины 3. Одна из полумуфт сидит на валу со скользящей шпонкой. Полумуфта через рычаг 4 воздействует на микропереключатель 1. При возникновении на валу заданных сил сдвинутая полумуфта, воздействуя через рычаг на микровыключатель, вызывает его срабатывание.
Токовое реле (рис. 15, б) состоит из токовой катушки 1, рычага 2 и контактов К1, К2. Токовая катушка включена в цепь электродвигателя, приводящего в движение рабочий орган, сила которого контролируется. При увеличении силы в рабочем органе увеличивается сила тока двигателя, который приводит в движение рабочий орган, это, в свою очередь, вызывает увеличение силы тока в токовой катушке реле, и электромагнитная сила FЭМ токовой катушки становится больше, чем сила пружины 3 FПР (силу пружины устанавливают с помощью регулировочного винта). Произойдет опрокидывание рычага, который, воздействуя на контакты, вызовет их срабатывание.
Тензометрические датчики сопротивления предназначены для определения упругих деформаций (растяжения, сжатия, изгибающих и крутящих моментов) деталей машин и конструкций в линейном и плосконапряженном состоянии при воздействии на них статических и динамических нагрузок.
Основой конструкции датчиков (рис. 15, в) служит константановая проволока диаметром 0,01—0,05 мм, сложенная зигзагообразной решеткой между склеенными полосками бумаги или пленки.
Для измерения деформаций датчик приклеивается к поверхности измеряемой детали.
При воздействии на испытуемую деталь или конструкцию каких-либо деформаций, например, растяжения, будет растягиваться проволока датчика. При этом за счет увеличения длины l проволоки тензодатчика и уменьшения ее сечения S сопротивление проволоки R = рl/S увеличивается. Это сопротивление является выходной величиной датчика. Такая деформация показана на рисунке сплошной стрелкой. Если деформацию направить так, как показано на рисунке пунктирной стрелкой, проволока тензодатчика в местах ее изгиба еще более изогнется. Длина и толщина проволоки при этом практически не меняются, не меняется и сопротивление датчика. Отсюда видно, что деформацию такого направления датчик не измеряет. Кроме проволочных существуют еще тензодатчики, у которых проводящий элемент делается из фольги толщиной 4—12 мм. По сравнению с проволочными у этих датчиков сила рабочего тока значительно выше, следовательно, повышена чувствительность датчика.
Пьезоэлектрические датчики для измерения сил представляют собой кварцевую пластину 1 (рис. 15, г). С двух сторон ее напылены или приклеены токопроводящим клеем электроды 2, с которых снимается выходное напряжение.
Два электрода и кварцевый диэлектрик образуют конденсатор, на электродах которого присутствуют электрические заряды, возникающие вследствие прямого пьезоэлектрического эффекта при сжатии кварцевой пластины силой Р.
 Электрический заряд пропорционален сжимающей силе Р: Q = αР, где α — коэффициент пропорциональности, называемый пьезомодулем. Под действием изменяющейся силы Р на электродах датчика появляется выходное напряжение UВЫХ = Q/(СД + СМ) = α/( СД + СМ) Р, где СД — емкость датчика; СМ — монтажная емкость. Выходное напряжение датчиков изменяется от единиц милливольт до единиц вольт.
Электрический заряд пропорционален сжимающей силе Р: Q = αР, где α — коэффициент пропорциональности, называемый пьезомодулем. Под действием изменяющейся силы Р на электродах датчика появляется выходное напряжение UВЫХ = Q/(СД + СМ) = α/( СД + СМ) Р, где СД — емкость датчика; СМ — монтажная емкость. Выходное напряжение датчиков изменяется от единиц милливольт до единиц вольт.
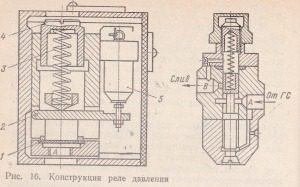
Реле давления (рис. 16). Изменение нагрузки в рабочих органах вызывает изменение давления в гидросистеме (ГС), а, следовательно, изменение давления в плоскости А датчика, которая подсоединена к гидросистеме. Происходит прогибание мембраны 1; при это рычаг 2, сжимая пружину 3, проворачивается и воздействует на микропереключатель 5, вызывая его срабатывание. Сила срабатывания реле регулируется с помощью регулировочного винта 4. Применяются также защитные реле давления в виде сливного клапана.

Здравствуйте, спасибо за прекрасный сайт.