Станок (рис. 11.7) предназначен для обработки деталей больших размеров и массы. На нем можно растачивать, сверлить, зенкеровать и развертывать отверстия, нарезать наружную и внутреннюю резьбы, цековать и фрезеровать поверхности. На станке целесообразно обрабатывать детали, у которых нужно растачивать несколько параллельно расположенных отверстий с точным расстоянием между их осями. Станок имеет неподвижную переднюю стойку, поворотный стол с продольным и поперечным перемещением относительно оси шпинделя и планшайбу с радиальным суппортом.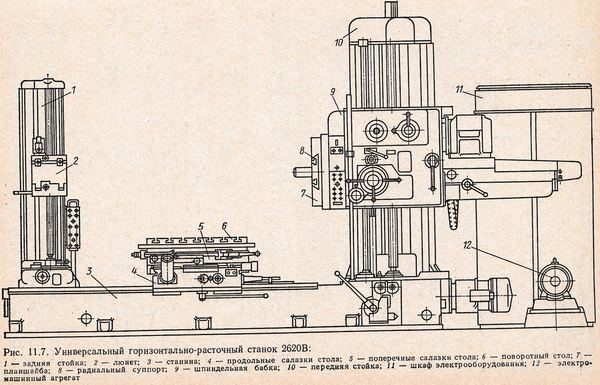
Техническая характеристика станка
Диаметр выдвижного шпинделя, мм………….. 90
Размеры стола, мм:
- длина………………………….1250
- ширина……………………… 1120
Наибольшие перемещения стола, мм:
- поперечное……………………. 1000
- продольное…………………… 1090
Наибольшее вертикальное перемещение шпиндельной бабки, мм 1000
Наибольшая масса устанавливаемой заготовки, кг……. 2000
Наибольшее осевое перемещение выдвижного шпинделя, мм … 710
Частота вращения, мин-1:
- шпинделя…………………….12,5-1600
- планшайбы…………………… 8-200
Осевая подача шпинделя, мм/мин…………… 2,2-1760
Мощность электродвигателя главного движения, кВт…… 8,5/10
Масса станка, т………… 12,5
Принцип работы станка заключается в следующем. Инструмент крепят в шпинделе или в суппорте планшайбы, он получает главное движение — вращение. Заготовку устанавливают непосредственно на столе или в приспособлении. Столу сообщается продольное или поперечное поступательное движение. Шпиндельная бабка перемещается в вертикальном направлении по передней стойке (одновременно с ней вертикально перемещается опорный люнет на задней стойке). Расточный шпиндель получает поступательное перемещение (при растачивании отверстий, нарезании внутренней резьбы и т. п.). Суппорт планшайбы перемещается по планшайбе в радиальном направлении. Все эти движения являются движениями подач.
Движения в станке (рис. 11.8). Главное движение — вращение шпинделя и планшайбы. Шпиндель и планшайба станка вращаются от двухскоростного электродвигателя мощностью N = 8,5/10 кВт через коробку скоростей с двумя тройными блоками зубчатых колес Б1 и Б2. Планшайба 4 начинает вращаться при включении муфты М1, которая приводит в движение зубчатое колесо 21, свободно посаженное на валу IV. От вала IV через передачу 21/92 получает вращение пустотелый вал VII и закрепленная на нем планшайба 4.
Уравнение кинематической цепи для минимальной частоты вращения планшайбы:![]()
Шпиндель 6 получает вращение через колеса 30/86 (как показано на схеме) или через зубчатые колеса 47/41 в зависимости от положения муфты М2.
Уравнение кинематической цепи для минимальной частоты вращения шпинделя:![]()
Подачи и быстрые установочные перемещения рабочих органов станка осуществляются от регулируемого электродвигателя М2 мощностью N = 2,1 кВт, работающего в системе генератор — двигатель. Подача и скорость установочных перемещений регулируются в широких пределах путем бесступенчатого изменения частоты вращения вала электродвигателя. Движение рабочих органов станка реверсируется также электродвигателем.
От этого электродвигателя могут осуществляться следующие механические подачи и установочные движения рабочих органов: осевая подача расточного шпинделя 6 и радиальная подача суппорта 5, вертикальное перемещение шпиндельной бабки 3 и одновременное перемещение люнета 1, поперечная и продольная подачи стола 2.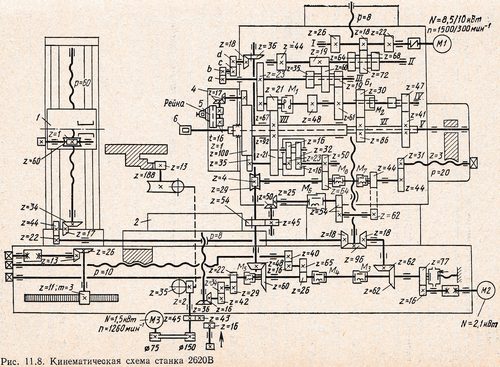
Осевое перемещение расточного шпинделя может осуществляться механически и вручную. Осевая подача расточного шпинделя сообщается от электродвигателя постоянного тока М2 мощностью N = 2,1 кВт через цилиндрическую пару 16/77, электромагнитную муфту М5, коническую пару 60/48, цилиндрические колеса 54/45, коническую передачу 50/25, муфту М6, цилиндрические колеса 54/65, 62/44, 44/31 и ходовой винт с шагом р = 20 мм.
При нарезании резьбы необходимо, чтобы за один оборот шпинделя осевое перемещение его было равно шагу нарезаемой резьбы. Расчетная кинематическая цепь при нарезании резьб начинается от шпинделя 6 и заканчивается его осевым перемещением. Необходимый шаг нарезаемой резьбы обеспечивается подбором сменных зубчатых колес a/b c/d.
Радиальное перемещение суппорта планшайбы осуществляется через планетарный механизм. Корпус планетарного механизма вращается от вала VII планшайбы через косозубую передачу 92/21. Кроме того, центральное зубчатое колесо z = 16 этого механизма вращается от вертикального вала через червячную пару 4/29, муфту М8 и цилиндрическую пару 64/50. Планетарный механизм, суммируя оба эти движения, вращает вал с зубчатым колесом z = 35 и через зубчатую передачу 35/100 100/23 конические колеса 17/17 и червячно-реечную передачу перемещает радиальный суппорт планшайбы.
Суппорт расположен на планшайбе, которая может вращаться с различной частотой n’. Это усложняет механизм подач суппорта. Для осуществления движения суппорта на планшайбу свободно насажено зубчатое колесо z = 100, которое получает вращение от зубчатого колеса z = 35, посаженного на левом ведомом валу планетарной передачи. У этой передачи для данного станка ведущими являются корпус (водило) и вал с зубчатым колесом z = 16. Обозначим частоту вращения вала с колесом z = 16 через n1 частоту вращения корпуса (водила) n0, а частоту вращения ведомого вала через n4. Для определения частоты вращения валов планетарной передачи используют формулу Виллиса:![]()
где m — число наружных зацеплений (для данного случая m = 2).
Подставив в формулу Виллиса значения чисел зубьев зубчатых колес z1, z2, z3 и z4, получим:![]()
Отсюда выводим формулу для определения частоты вращения ведомого вала:![]()
Теперь находим частоту вращения зубчатого колеса z=100 при выключенном механизме подач, т. е. при n1 = 0 и при планшайбе, вращающейся с частотой n’:
Следовательно, частота вращения зубчатого колеса z = 100 при выключенном механизме подач будет совпадать с частотой вращения планшайбы, т. е. зубчатое колесо z = 100 будет вращаться синхронно с планшайбой и суппорт не будет иметь радиального перемещения. Для определения величин радиального перемещения суппорта необходимо знать передаточное отношение i-передачи от вала с зубчатым колесом z = 16 до вала с колесом z = 23:![]()
Тогда уравнение кинематической цепи подачи радиального суппорта будет иметь вид:![]()
Вертикальное перемещение шпиндельной бабки осуществляется вертикальным ходовым винтом с шагом р = 8 мм при включенной муфте М3.
Вертикальное перемещение люнета производится ходовым винтом с шагом р = 6 мм одновременно и синхронно с вертикальным перемещением шпиндельной бабки. Точное положение люнета относительно оси шпинделя по высоте корректируют вручную, вращая гайку, перемещающую люнет.
Продольное перемещение стола осуществляется ходовым винтом с шагом р = 10 мм при включенной муфте M4, поперечное перемещение стола — от электродвигателя N = 2,1 кВт с помощью винта с шагом р = 8 мм. Стол поворачивается либо от отдельного электродвигателя М3 мощностью N = 1,5 кВт, либо вручную.
