В приводах подач металлорежущих станков применяют шаговые электродвигатели с гидроусилителями и без них. Шаговые двигатели позволяют работать с относительно высокой дискретностью перемещений (до 1 мкм). Шаговый двигатель (рис. 1) состоит из статора 1 и ротора 2. На внутренней поверхности статора расположены три ряда секций полюсов.
На роторе имеется такое же количество рядов полюсов, но каждый ряд полюсов ротора сдвинут относительно другого на угол, соответствующий 1/3 межполюсного расстояния; если полюсы первого ряда статора и ротора расположены точно друг против друга, то полюсы второй секции по отношению к полюсам статора окажутся сдвинутыми на 1/3, а полюсы третьей- на 2/3 шага статора.
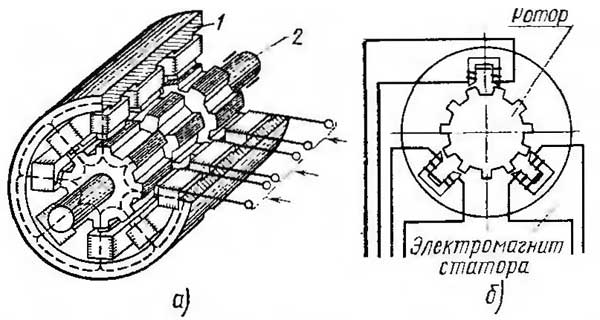
Рис. 1. Электрический шаговый двигатель: а — общин вид в разрезе, б — схема
Обмотки полюсов каждого ряда соединены последовательно. Если поочередно подавать импульсы тока постоянного напряжения на обмотки полюсов шагового двигателя, ротор будет прерывисто поворачиваться на строго определенную величину — один угловой шаг на каждый импульс тока. Этому повороту соответствует перемещение рабочего органа машины на определенную небольшую величину. Частота электрических сигналов и соответствующих им шаговых перемещений определяет скорость движения, а количество сигналов и шаговых перемещений — величину пути перемещения рабочего органа станка.
