В ПР с цикловым программным управлением УЧПУ представляют собой программируемый контроллер, работающий по принципу синхронного программного автомата с жестким циклом управления. Программирование осуществляется исключительно логической и технологической информацией, определяющей последовательность движений звеньев манипулятора, длительность позиционирования и проверку условий исполнения команд по различным признакам.
В развитых устройствах циклового программного управления на базе микроэлектронных модулей блок управления построен на базе центрального микропрограммного автомата и ряда автоматов местного управления, выполненных в виде микроконтроллеров, которые управляют отдельными внешними устройствами.
В качестве программоносителя в устройствах управления используется оперативное запоминающее устройство ОЗУ на интегральных микросхемах. Отличительной особенностью таких устройств является функционально-гибкая привязка устройств циклового программного управления с манипулятором.
Система опроса датчиков имеет в своем составе ОЗУ для хранения текущего состояния датчиков манипулятора. Коммутатор датчиков, опрашивающий все датчики манипулятора последовательно по всем координатам, управляется схемой местного управления. Опрошенное состояние записывается в ОЗУ (фотография объекта). В процессе работы информация о состоянии звеньев манипулятора, записанная в ОЗУ, по запросу из блока управления передается в систему выдачи команд на манипулятор, что необходимо для определения режимов работы, а также формирования сигналов отработки, запрета или прерывания на интервал времени.
Сопряжение устройства циклового программного управления с приводами различных типов обеспечивается путем организации системы выдачи команд, которая позволяет программировать алгоритм управления практически любым приводом, в том числе и приводом с промежуточными точками позицирования на упорах с режимами управления движением при торможении.
Система выдачи команд на манипулятор, как правило, имеет выходные регистры для хранения всех состояний управляемых золотников и выходные усилители. В ее состав входят также матрицы состояний кодирования и стробирования со схемами управления, где матрица состояний выявляет одно из возможных состояний звена, определяемое режимом, направлением движения звена и номером точки, в которую оно должно выйти. Матрица имеет входные и выходные шины, число которых определяется числом звеньев (координат) и точек позицирования.
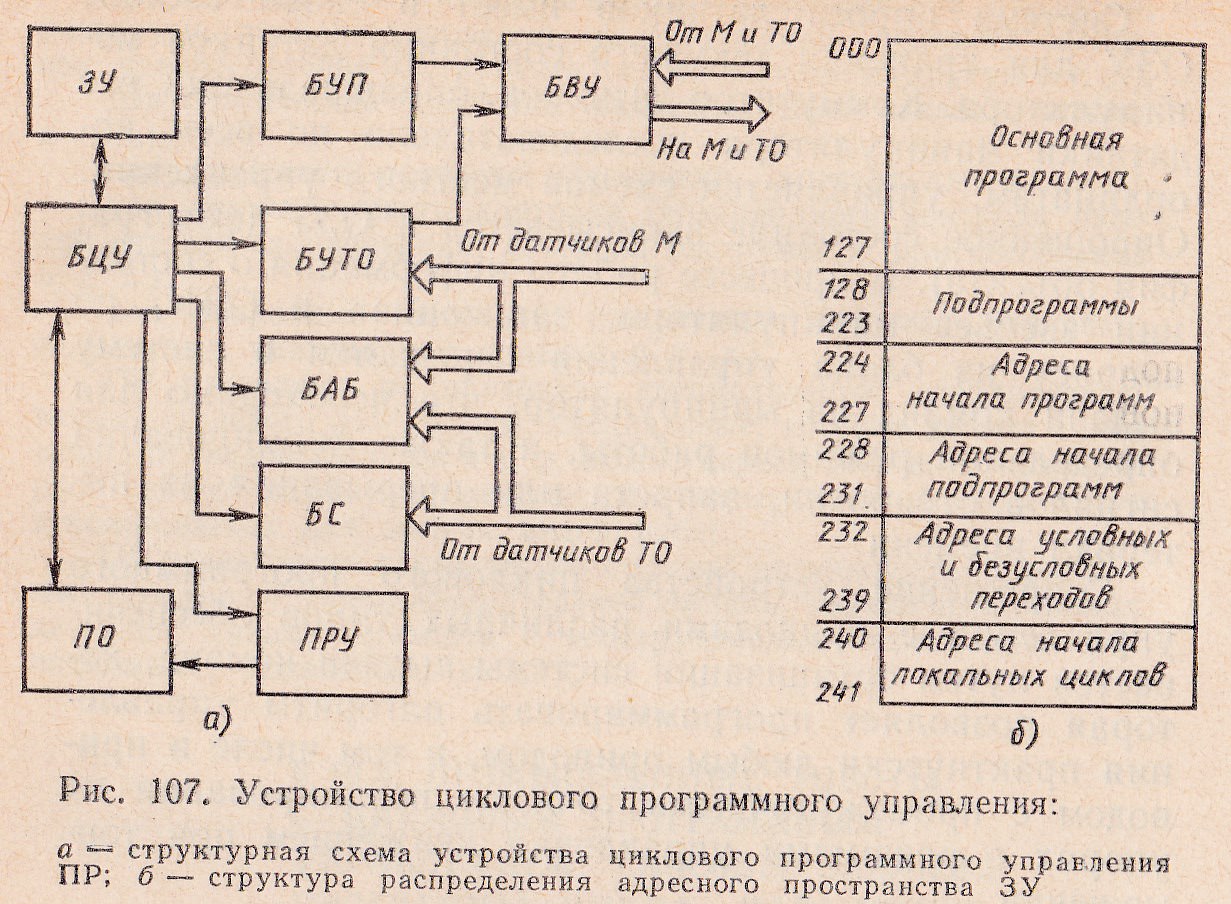
На рис. 107, а показана структурная схема устройства циклового программного управления промышленным роботом. В устройство ЦПУ входят несколько блоков. Запоминающее устройство (ЗУ) предназначено для хранения управляющих команд промышленного робота и состояний технологического объекта (станок). Распределение адресного пространства ЗУ дано на рис. 107, б. ЗУ имеет следующие массивы:
- для записи четырех основных программ (000—127 — адреса, отведенные для данных программ);
- для записи подпрограмм, т. е. стандартных участков исполнения циклов (128— 223);
- ячеек адресов начала программ (224—227);
- ячеек начала подпрограмм (228—231);
- адресов условных и безусловных переходов (232—239);
- адресов начала локальных циклов (240, 241).
В ЗУ предусмотрен также ряд специализированных ячеек, в которых записываются адреса переходов при исполнении команд «Обращение к подпрограмме», «Условный переход», «Конец программы», «Конец цикла». В этих ячейках хранятся адреса обращения после прерывания и результата предыдущего действия (РПД).
Блок центрального управления (БЦУ) выполняет следующие операции:
- обрабатывает информацию по заданной программе и выдает управляющие воздействия через блоки связи на звенья манипулятора и технологического оборудования;
- осуществляет связь с пультом оператора (ПО) и пультом ручного управления;
- обеспечивает анализ сигналов, поступающих от датчиков, которые установлены на манипуляторе и технологическом оборудовании;
- производит блокировку технологических команд управления индикацией, дешифрацию и обработку команд;
- модификацию адресов считываемых команд из ЗУ по адресу;
- расшифровывает у команды код операции; формирует текущие адреса и хранит их в регистре адресов;
- хранит адрес первой команды; формирует адреса внутри кадра с фиксированным шагом посредством счетчика адресов команд;
- формирует исполнительный адрес, в этом случае программный адрес передается в ЗУ для формирования исполнительного адреса (операция модификации адреса).
Модифицированный адрес может быть адресом перехода к произвольной команде, к началу программ, подпрограмме, началу цикла при многократном его повторении, а также к адресу N + 1 (переадресация с постоянным шагом, равным 1).
Блок управления приводами (БУП) с помощью диодных матриц (согласно коду команды) подает управляющие сигналы на те или иные исполнительные звенья, а также формирует блокирующие сигналы, разрешающие или запрещающие выдачу команд управления, формирует сигналы состояния степени движения (координаты) манипулятора, определяет номера и число усилителей, управляет замедлением при выходе в заданную позицию.
Блок управления технологическим оборудованием (БУТО) предназначен для формирования команд управления внешним оборудованием и захватными устройствами манипулятора, дешифрации команд и их распределения по адресам (сигналов на необходимые рабочие органы), отмены команд или их запрета при наличии блокировочных сигналов. Отработка команд заканчивается по истечении выдержки времени или после получения ответного сигнала подтверждения («выполнено»).
Технологические команды разбиты на две группы по шесть адресов. Блок аварийных блокировок (БАБ) обеспечивает прием сигналов блокировок от манипулятора (М) и технологического оборудования (ТО) на 20 адресов; в качестве блокировок могут восприниматься сигналы датчиков положения, датчиков аварийных состояний технологического оборудования и манипулятора, датчиков защиты М и ТО от появления недопустимых значений технологических процессов. Опрос состояния датчиков блокировок при выполнении команд движений звеньев производится с помощью тактирующего дешифратора. В случае отсутствия аварийной ситуации схема управления матрицей стробирования выдает на последнюю очередной тактирующий сигнал. Блокировочные сигналы на исполнение технологических команд с матрицей блокировок вырабатываются схемами формирования блокировок для двух внешних объектов. Сигналы запрета запоминаются на триггерах. Блокировки осуществляются также при отсутствии исходного состояния узлов технологического оборудования и манипулятора.
Блок сопряжения с датчиками (БС) производит опрос датчиков состояния положения звеньев с записью состояний в специальное ОЗУ. В процессе исполнения команд программная информация, а также информация опроса состояния датчиков из ОЗУ поступают в блок центрального управления для обработки информации и анализа.
Блок выходных усилителей (БВУ) предназначен для выдачи команд управления необходимой мощности на электромагниты (исполнительные органы манипулятора) и исполнительные органы технологического оборудования. Блок состоит из 15 взаимосвязанных плат, усилителей и цепей развязки (может обеспечивать управление пятнадцатью исполнительными органами).
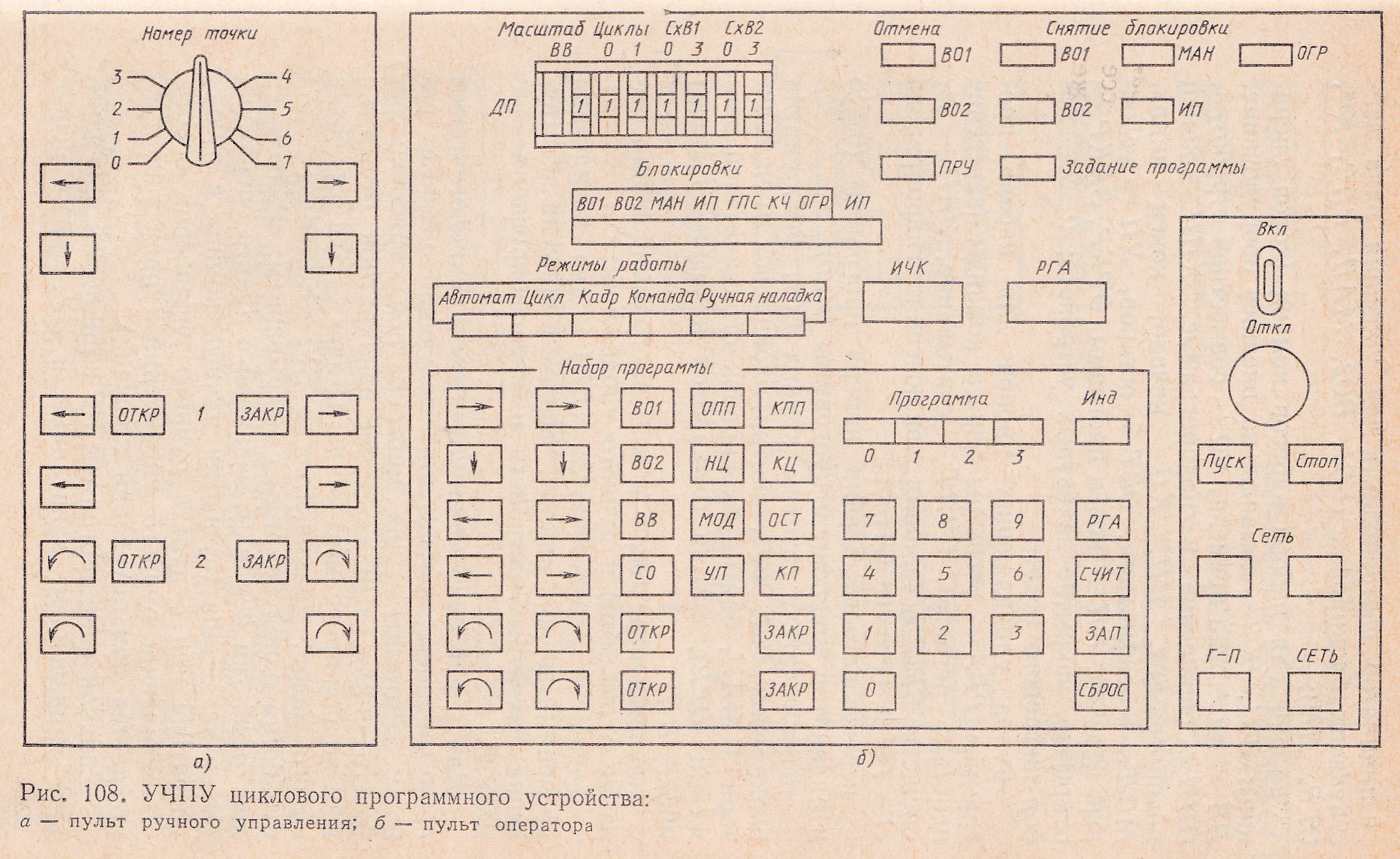
Пульт ручного управления (ПРУ) (рис. 108, а) служит для управления звеньями манипулятора в наладочном режиме. Он имеет следующие органы оперативного управления:
- 12 кнопок управления движениями по соответствующим координатам (степеням свободы);
- четыре клавиши для управления двумя захватными устройствами;
- многопозиционный переключатель, с помощью которого задается номер точки движения звена манипулятора при выбранном перемещении (одна из осей движений какого-то звена).
Пульт оператора (рис. 108, б) предназначен для загрузки УЧПУ управляющими программами, для их контроля и отладки, задания режимов работы ПР и устройства управления, индикации состояний устройств управления и объекта, ручного управления звеньями манипулятора.
В состав ПО входят следующие оперативные органы управления:
- плата индикации информационной части команд для индикации частей цикла (ИЧК), а также индикации регистра адреса команды (РГА), указывающей номер исполняемой команды;
- индикатор светодиодный для указания вида действующих блокировок (В01, В02, МАЛ, ГПС, КЧ, ОГР, ИЛ);
- кнопки для набора адресов команд (кодов операции): В01, ВО2 — команды на внешнее оборудование, ВВ — выдержка времени, СО — совместная отработка, ОПП — обращение к подпрограмме, КПП — конец подпрограммы, НЦ, КЦ — начало, конец цикла, МОД — модификация, ОСТ — останов, УП — условный переход, К Л — конец программ, ОТКР, ЗАКР —т открытие, закрытие захватных устройств; 0—9 — набор цифрового кода;
- группа управляющих кнопок для набора программы: РГА — регистры адреса команды (занесение адреса в регистр), СЧИТ — считывание, ЗАЛ — запись, «СБРОС», кнопки включения гидропривода «Г—П» и сети («СЕТЬ»);
- переключатель задания номера программы (0—3) и индикатор заявленной программы (Инд);
- переключатели: отмены команд В01, В02, снятия блокировок В01, В02, снятия блокировок манипулятора — МАЛ, снятия блокировок ограничителей движений (ОГР), снятия блокировок исходных положений — ИЛ;
- клавиши перехода в режим программирования (задание программы) и ручного управления;
- декадный переключатель (ДЛ) — для назначения времени выдержки циклов, выдержки времени действующих захватных устройств и масштабирования времени.

Для управления манипулятором и технологическим оборудованием используют следующие режимы работы: «Автомат» — для многократной отработки рабочего цикла; «Цикл» — для однократной отработки всех кадров программы цикла; «Кадр» — для отработки одного кадра, хранящегося в ЗУ; «Команда» — для отработки одной команды с прерыванием; «Ручной» — для отработки команды, заданной с пульта оператора; «Наладка» — для отработки ручных команд с пульта оператора или с пульта ручного управления посредством клавиш ручного управления (управление прекращается при опускании клавиши).
Управляющие программы ПР с цикловым программным управлением, записанные в ЗУ, могут исполняться в различных модификациях в зависимости от того, какие алгоритмы управления манипулятором необходимо организовать.
На рис. 109, а показана структурная схема кадра совместной отработки действий, записанных в управляющей программе. В этом случае по записанной УП осуществляется совместное исполнение команд, записанных в программе. В первом кадре УП записывается число совместно исполняемых команд (ЧСИК). Эта запись производится в информационной части кадра и указывает команды управления манипулятором и технологическим объектом, которые выполняются совместно. В коде операции начальной команды (КОП) также указывается признак совместной отработки (СО). В совместных командах могут программироваться команды выдержки времени при исполнении отдельных команд, в последующих кадрах программируются движение (ДВ1—ДВі) и номера точек.
На рис. 109, 6 показана структурная схема исполнения УП с использованием подпрограммы (ПП). В данном случае устройство программного управления обеспечивает обращение к одной из четырех ПП, записанных в массивах 128—223. В первой команде основной УП в коде операции записывается команда «Обращение к подпрограмме» (ОПП). В информационной части данной команды записывается номер выполняемого условия, по которому осуществляется обращение к ПП. Кроме того, в самой подпрограмме записывается команда «Конец подпрограммы», которая организует выход из подпрограммы в основную часть УП. При обращении к ПП запоминается команда основной программы до обращения к ПП, следовательно, выход из подпрограммы в основную программу происходит по адресу N + 1, где N — исполняемая команда до обращения к ПП.
На рис. 109, в показана структурная схема алгоритма исполнения УП с одним локальным циклом. Для исполнения локальных циклов как отдельных участков программы предусмотрены два аппаратных счетчика (счетчик цикла повторений) и команды «Начало цикла» и «Конец цикла». В информационной части команд «Начало цикла» (НЦ) и «Конец цикла» (КЦ) указывается номер счетчика циклов (СЦ). Первыми контролируются нули (СЦ) 0, а вторыми — единицы (СЦ) 1 Адрес возврата к началу цикла записывается в ячейки 240, 241, следовательно, при наличии двух счетчиков можно иметь два «вложенных» цикла. Число повторений локального цикла задается на декадном переключателе, расположенном на пульте оператора, который опрашивается при повторении каждого цикла. Число повторений задается на единицу меньше, так как один проход локального цикла происходит в естественной форме.
Отработка участка программы с вложенной подпрограммой повторяется через заданное число циклов основной программы, после исполнения участка УП циклически происходит выход на продолжение основной программы или выход на подпрограмму.
Структурная схема алгоритма исполнения УП показана на рис. 109, г. В этом случае после обращения к какому-то участку программы или подпрограммы можно выйти на начало цикла и после необходимого числа его повторений — на основную программу или подпрограмму, где в команде начала цикла указано число повторений, а в команде конца цикла — адрес выхода из цикла.
На основании анализа технических требований, предъявляемых к современным системам циклового программного управления ПР, у разработчиков появились тенденции расширения возможностей циклового программного управления на базе программируемых микроконтроллеров, где система циклового программного управления ПР может являться составной частью системы программного управления. Основная система управления построена на базе микроЭВМ, а система управления ПР является ее составной частью и может быть выполнена в виде программируемого микроконтроллера. Такая тенденция развития системы управления ПР вызвана тем, что их часто встраивают в технологические модули или технологические комплексы типа технологического модуля (ТМ), ГПМ, РТК. ГПС. Такая возможность организации систем управления появилась в связи с созданием всевозможных микропроцессорных наборов разного назначения. Таким образом, если раньше в разработках устройств циклового программного управления для ПР акцент делался на аппаратно-схемную реализацию алгоритмов управления, то в настоящее время он делается на унифицированное микропроцессорное управление ПР с развитым математическим обеспечением и набором проблемно ориентированных модулей сопряжения системы управления с ПР, технологическим объектом и другими устройствами, обслуживающими их.
Поэтому за последнее время получили развитие устройства ЦПУ на базе модульных средств вычислительной техники, объединенных магистральной связью, с применением в данных устройствах ЧПУ программируемых и репрограммируемых модулей, которые могут выполнять гибкую привязку устройства управления с объектом управления. С учетом такой концепции структурная схема микропроцессорной системы циклового программного управления может быть такой, как показано на рис. 110.
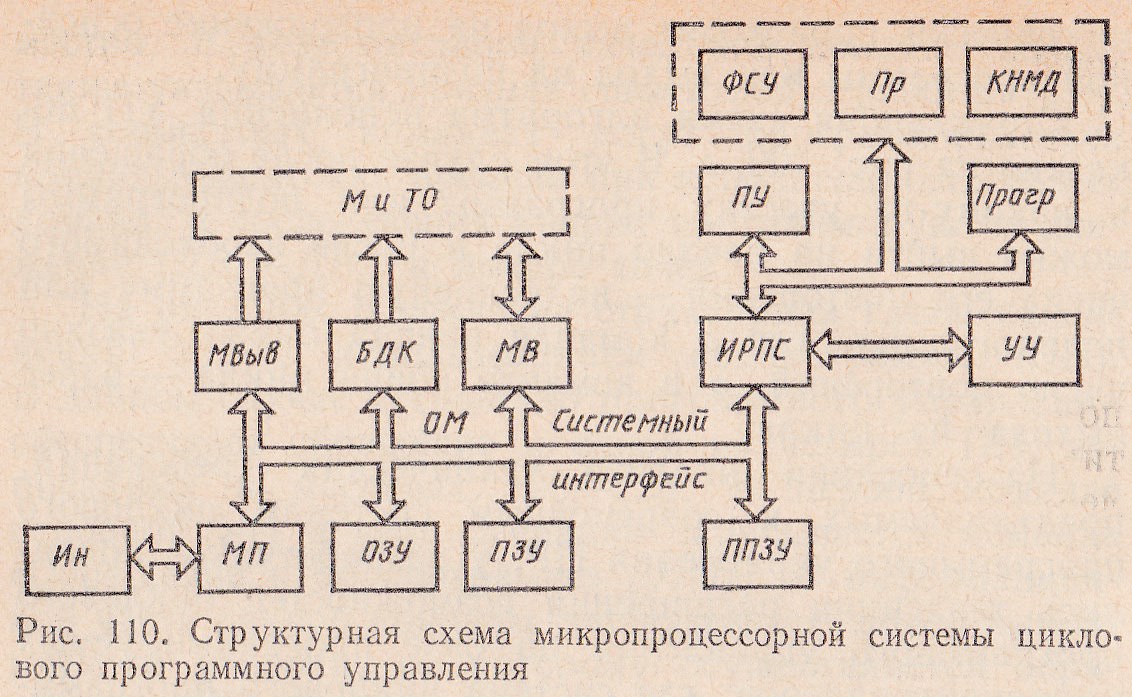
Микропроцессорное устройство циклового программного управления включает в себя следующие модульные устройства: модуль центрального процессора (МП), модуль специализированного процессора — интерполятор (Ин). МП обеспечивает в соответствии с записанной в памяти программой реализацию алгоритма управления и возможность отработки УП в реальном масштабе времени благодаря развитой системе прерываний и программируемому таймеру. Отработка УП в реальном масштабе времени возможна также благодаря применению магистральной шины обмена с системным интерфейсом и дополнительного специализированного процессора, предназначенного для расчета траекторий движений методом линейно-круговой интерполяции.
В центральном процессоре УЧПУ предусмотрен специальный контроллер, вырабатывающий сигналы внутрисистемного интерфейса, что обеспечивает информационную связь всех модулей через общую магистраль обмена информацией (ОМ).
Система памяти блока управления включает в себя следующие модули:
- постоянное запоминающее устройство (ПЗУ) — для хранения функционального программного обеспечения УЧПУ;
- оперативное запоминающее устройство (ОЗУ) — для хранения текущей обрабатываемой информации;
- постоянное перепрограммируемое запоминающее устройство (ППЗУ), выполняющее функцию программоносителя для записи и хранения УП методом обучения, а также записи и хранения стандартных обслуживающих программ, программ контроля узлов и стандартных программ и микропрограмм управления;
- перепрограммируемое запоминающее устройство (ППЗУ) содержит программы типа контроллер (программы, обеспечивающие управление обменом информации, а также управление некоторыми внешними устройствами).
Программирующий блок (Прогр) обеспечивает ввод и редактирование УП на языке УЧПУ или другом языке более высокого уровня. Он подключен к внутрисистемному интерфейсу, внешним устройствам и ЭВМ высшего ранга. К общей интерфейсной шине подключены также внешние устройства типа фотосчитывающих устройств (ФСУ), перфоратор (Пр) и внешняя память в виде кассетного накопителя на магнитных дисках (КНМД), которые с помощью контроллера обеспечивают загрузку УЧПУ управляющими программами с программоносителей или из архива памяти.
Посредством интерфейсного модуля радиально-последовательного действия (ИРПС), который управляется специальным модулем (УУ), обеспечивается селекторная связь со всеми внешними устройствами с прерыванием по запросу и с последовательной посылкой информации по запросу. Канал связи идентифицируется (установление соответствия между объектом и процессором микроЭВМ, где объект представлен некоторой совокупностью экспериментальных данных о свойствах объекта), что позволяет значительно сократить число шин в каналах связи. Через этот интерфейсный модуль осуществляется связь с пультом ручного управления (ПУ) звеньями манипулятора (М) и технологическим объектом (ТО), что дает возможность обеспечивать ручное управление электроавтоматическими устройствами, обслуживающими технологическое оборудование, а также отыскание и вызов в массив рабочей памяти архивных УП, их просмотр и редактирование. При связи с другими внешними устройствами ИРПС управляется специальными модулями типа микроконтроллеров. Совместно с модулями дискретных команд ИР ПС управляет слаботочными электроавтоматическими устройствами технологического оборудования, а также выполняет синхронизацию работы узлов ПР с работой других средств робототехнического комплекса.
Сопряжение устройства циклового программного управления с манипулятором и технологическим оборудованием осуществляется с помощью специальных модулей ввода (МВ) и модуля вывода (МВт), число которых зависит от числа объектов управления, стыкующихся с УЧПУ.
Модуль ввода (вывода) модифицируется по своему назначению в зависимости от типа применяемых приводов, измерительной системы, видов датчиков и т. д. В комплекс УЧПУ может входить инженерный пульт, подключенный через ИРПС для выполнения диагностических и ремонтно-профилактических работ при эксплуатации УЧПУ и оборудования.
Программное обеспечение УЧПУ может включать в себя:
- проблемно ориентированный язык циклового программного управления;
- интерпретацию языка для трансляции на язык УЧПУ;
- программу монитор интерпретатора для загрузки УП;
- драйвер каналов последовательной передачи информации при вводе-выводе;
- программные модули обслуживания терминалов в виде пульта оператора, пульта индикатора, пульта программатора и т. д.;
- программу диспетчер для организации работ устройства;
- комплект программ контроля и диагностики.
При необходимости структура и алгоритмическое построение монитора интерпретатора и диспетчера обеспечивают мультипрограммный режим работы для одновременного управления работой нескольких манипуляторов и объектов управления.
