Промышленные роботы — универсальные автоматические манипуляторы с программным управлением — способны перемещать изделия или другие производственные объекты в любую точку обслуживаемого пространства. Промышленные роботы оснащаются различными системами программного управления, позволяющими осуществлять переналадку и управление сложными перемещениями. При создании автоматических линий и участков из станков с ЧПУ встает задача совместить в едином цикле основные технологические, транспортные и загрузочно-разгрузочные операции, повысить общую культуру производства. Этот вид оборудования отличает сравнительная простота обеспечения сложной циклограммы работы, в том числе изменения траектории движения исполнительных органов, изменения их скоростей, ускорений и нагрузок, смены рабочего инструмента, измерения обработанной детали и др. Промышленные роботы открывают широкие перспективы создания принципиально новых технологических процессов без непосредственного участия в них человека и имеют огромное социальное значение, освобождая людей от тяжелого и монотонного труда. Роботостроению уделяется важнейшее внимание в нашей стране и за рубежом.
Промышленные роботы классифицируют по различным признакам:
Для упрощения специальной оснастки роботов используют очувствленные роботы, имеющие контур адаптации. Исполнительная часть робота состоит из манипулятора и системы приводов. У подвижных роботов в исполнительную часть входит также механизм перемещения самого робота.
В качестве приводов для роботов используют гидравлические, пневматические, электромеханические, электрические или комбинацию этих видов приводов. Как прецизионные узлы манипуляторов и роботов используют высокочастотные вибрационные преобразователи движения — вибродвигатели, которые преобразуют высокочастотные колебания в непрерывное движение. При этом в основном применяются частоты ультразвукового диапазона (от 20 до 200 кГц), а амплитуды колебаний преобразователей лежат в диапазоне от десятых долей до единиц микрометров. Вибродвигатели имеют:
Необходимо отметить, что преобразователи вибродвигателей одновременно могут быть использованы и в качестве датчиков усилий или моментов, действующих на рабочее звено. Это упрощает конструкцию манипуляторов.
Рассмотрим некоторые захватные устройства промышленных роботов. Захватные устройства являются сменными элементами робота. По типу привода, захватные устройства разделяются на механические, пневмо-, гидро- и электромеханические, вакуумные и магнитные.
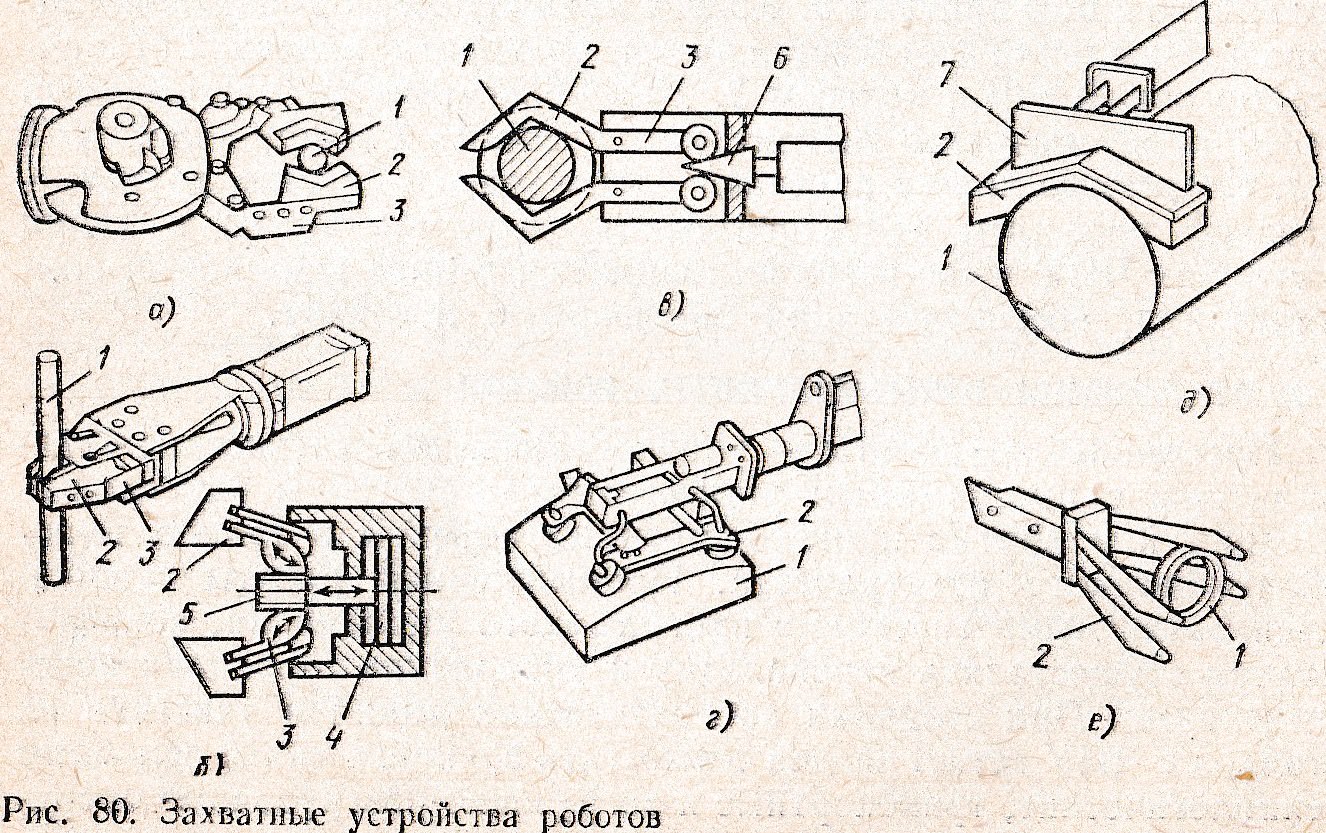
На рис. 80 представлены различные типы захватных устройств, монтируемых на руке робота.
В гидромеханическом рычажном устройстве (рис. 80, а) захват изделия 1 происходит клещами 2 при повороте рычагов 3, действующих от гидроцилиндра. В гидромеханическом реечном устройстве (рис. 80, б) захват изделия 1 происходит клещами 2 при повороте рычагов с зубчатыми секторами 3, находящимися в зацеплении с рейкой 5. Рейка перемещается от гидроцилиндра 4.
В механическом клиновом устройстве (рис. 80, в) захват изделия 1 производится клещами 2 при повороте рычагов 3 от перемещения клина 6. В вакуумном устройстве (рис. 80, г) изделия 1 удерживаются захватами 2 с резиновыми прокладками. После подхода руки робота к изделию из полости захватов откачивается воздух и образуется разреженная зона. Под действием силы атмосферного давления захваты прижимаются к изделию и удерживают его.
В магнитном устройстве (рис. 80, д) изделия 1 захватываются электромагнитами 2, в которых возникает магнитный поток, замыкающийся с изделием, после подключения обмоток катушек 7 электромагнитов к электропитанию.
В устройстве с эластичными камерами (рис. 80, е) захват изделия 1 осуществляется при откачке воздуха из эластичных резиновых камер 2 (в виде пальцев), благодаря чему пальцы сводятся к центру и изделие удерживается.
Разница между энергией электрического поля и энергией магнитного поля примерно такая же, как между энергией,…
Когда-то легендарный пастух Магнес, нашел природный магнитный камень, притягивающий железо. В последствии этот камень назвали магнетит или магнитный…
В электрических цепях применяются различные способы соединения конденсаторов. Соединение конденсаторов может производиться: последовательно, параллельно и последовательно-параллельно (последнее иногда называют смешанное соединение конденсаторов). Существующие…
Обозначение конденсаторов на схемах определено ЕСКД ГОСТ 2.728-74. Обозначения условные графические в схемах. Резисторы, конденсаторы. Итак,…
Узнав, что же такое конденсатор, рассмотрим, какие бывают виды конденсаторов. Итак, виды конденсаторов можно классифицировать по…
Вся энергия заряженного конденсатора сосредотачивается в электрическом поле между его пластинами. Энергию, накопленную в конденсаторе, можно определить…
{kind=link}