Для прерывистого перемещения рабочих органов станков используют механизмы периодического действия, которые за часть полного периода (цикла) своей работы сообщают исполнительному механизму прерывистое движение, повторяющееся в каждом цикле. Такие устройства необходимы для подачи стола на строгальных и долбежных станках, поворота многоинструментальных головок, поперечной подачи шлифовальной бабки, поворота нарезаемого зубчатого колеса на следующий зуб и т. д. Во всех указанных случаях рабочий орган станка совершает в определенный момент прерывистое перемещение. Обычно для периодических прерывистых движений узлов и деталей станков применяются следующие механизмы: храповые, кулачковые, мальтийские, с муфтами обгона, электрического действия, гидравлического и пневматического действий.
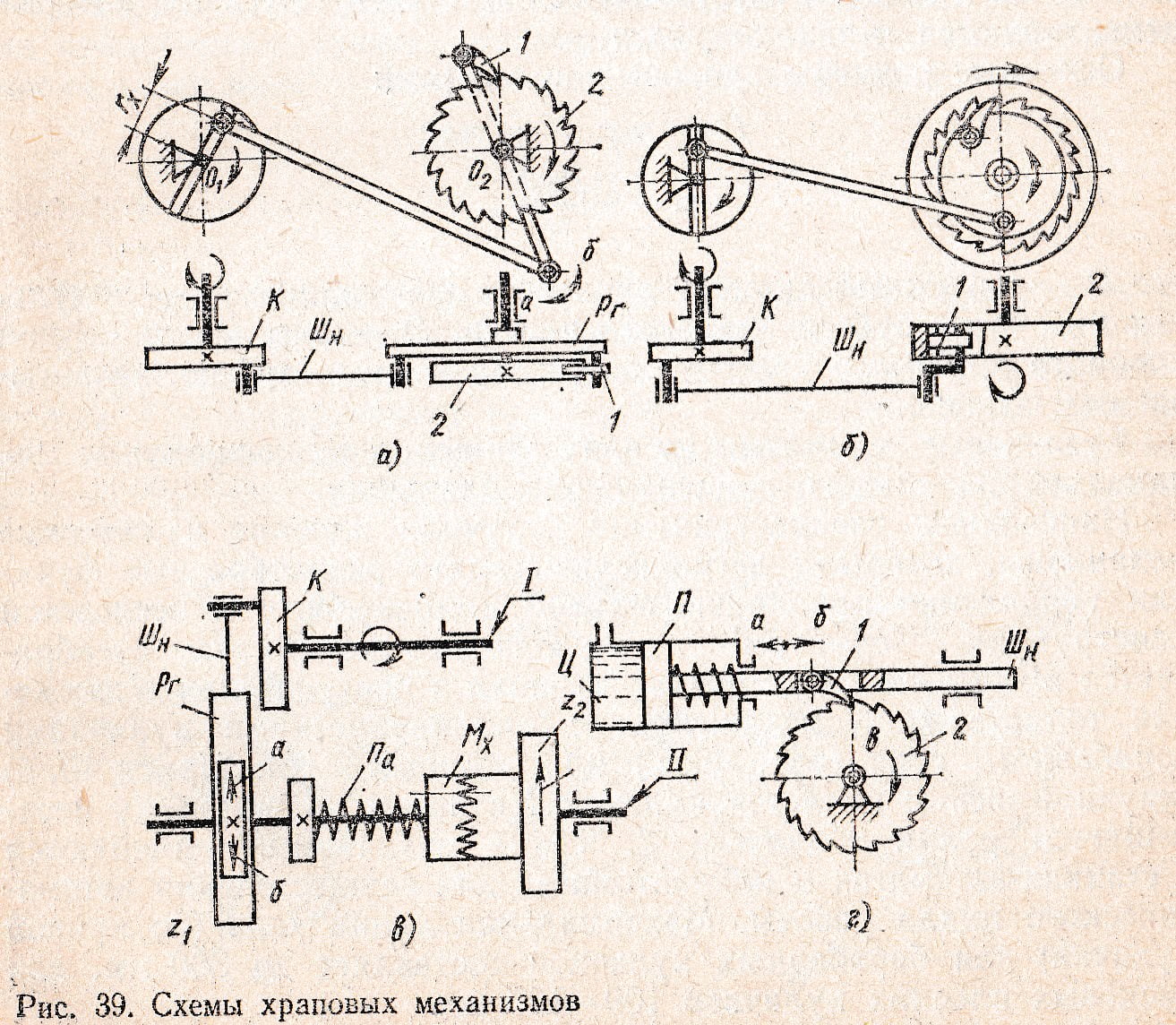
Основные схемы храповых механизмов показаны на рис. 39. Ведущим звеном является собачка 1, совершающая возвратно-качательное движение, а ведомым — храповое колесо 2, которое может быть с наружным (рис. 39, а), внутренним (рис. 39, б) и торцовым (рис. 39, в) зацеплениям и. При каждом цикле качания собачка поворачивает храповое колесо на заданное число зубьев и отходит в исходное положение, проскальзывая по зубьям храповика.
В механизме с наружным храповым колесом (см. рис. 39, а) при равномерном вращении кривошипа К, связанного с ним шатуна ШН рычаг РГ получает непрерывное качательное движение относительно точки 02. С рычагом РГ связана собачка 1, упирающаяся в зубья колеса z2. При качании коромысла по стрелке, а—б (в сторону б) собачка приподнимается, скользит по спинкам зубьев и колесо не поворачивается. Принцип действия других конструкций аналогичен.
На рис. 39, г показан храповой механизм с поршневым приводом, содержащим цилиндр Ц, поршень П и шатун ШН. Храповые колеса и собачки изготовляются из сталей 15Х, 20Х, которые цементируются и закаливаются.
Основные размеры храповых колес (мм):
где D — наружный диаметр храпового колеса, мм; m — модуль, мм; z — число зубьев храпового колеса; Р — шаг, мм; α — угол поворота храпового колеса, градус; α1 — число зубьев, захватываемых собачкой.
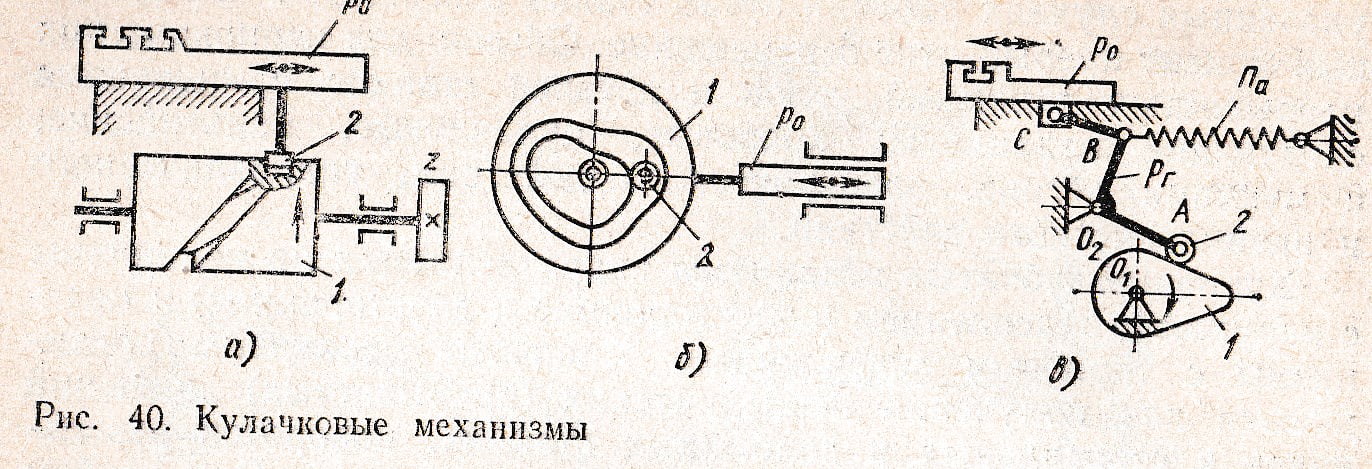
Кулачковые механизмы по виду движения разделяются на механизмы радиального и аксиального движения.
Принцип работы дискового кулачка (рис. 40, в) торцового типа состоит в следующем. Дисковый кулачок 1 равномерно вращается от привода вокруг оси О1. На поверхность профильного кулачка опирается ролик 2 с рычажным механизмом, заканчивающимся ползуном С, связанным с рабочим органом Р0. При равномерном вращении ролик 2 будет качаться соответственно профилю кулачка и через рычажный механизм, и ползун С передает прямолинейное возвратно-поступательное движение рабочему органу Р0. Материалами для кулачков обычно служат стали 50 и 40Х с поверхностной закалкой, при нагреве токами высокой частоты (ТВЧ) и закалке до твердости НRС 52—58.
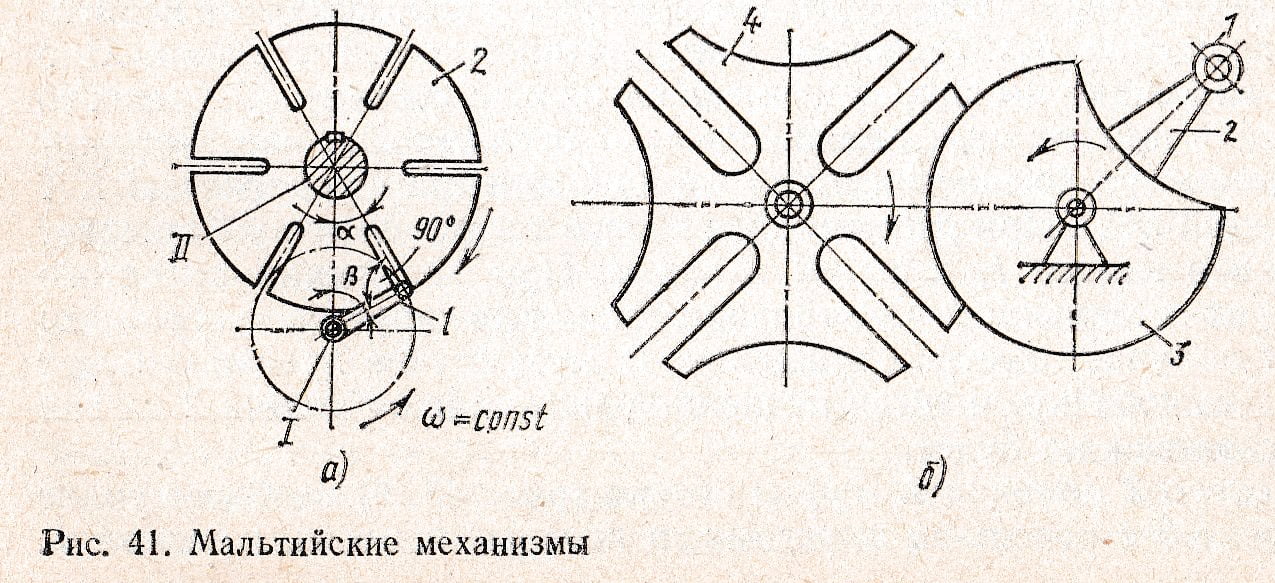
На рис. 41, б изображен мальтийский механизм, состоящий из кривошипа и креста, его передаточное отношение зависит от числа пазов креста, которых может быть от 3 до 8:
i=1/z
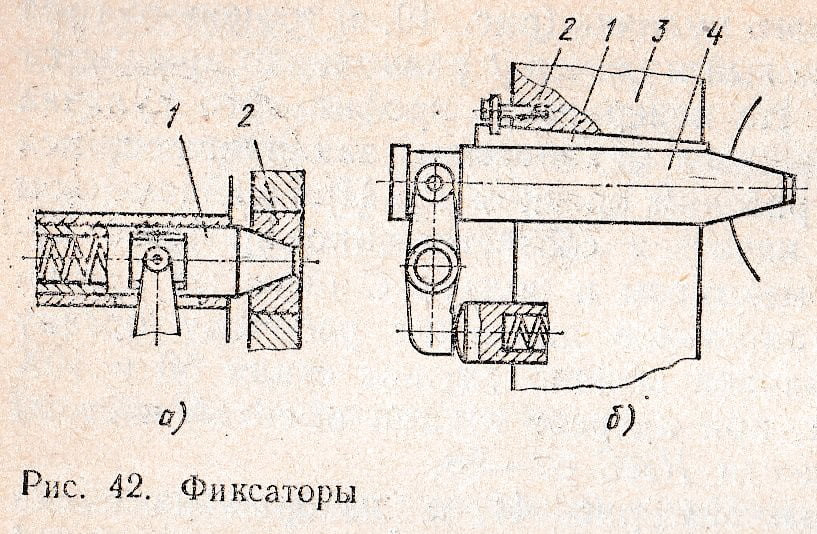
В четырехпозиционном мальтийском механизме при равномерном вращении кривошипа 2, закрепленный на нем ролик 1 в определенный момент входит в один из четырех пазов мальтийского креста 4 и поворачивает его на 90°. За каждый последующий полный оборот кривошипа 2 вал с мальтийским крестом сделает только 1/4 оборота. Диск 3, жестко связанный с кривошипом, служит для фиксации положения креста в каждой из его четырех позиций.
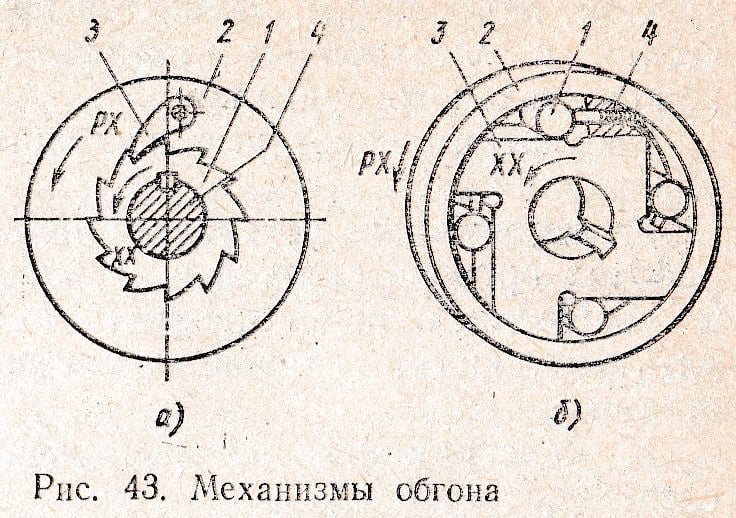
Механизмы обгона являются разновидностью дифференциальных механизмов. Их применяют в тех случаях, когда необходимо передавать два вращательных движения от двух независимых источников на один вал, а также используют для обеспечения медленных рабочих и быстрых холостых движений. Механизмы обгона конструируют в виде храповых, роликовых или шариковых муфт.
Колесо 2 роликовой муфты обгона (рис. 43, б) свободно сидит на диске 3 с угловыми вырезами, в которые помещены ролики 1.
Контакт роликов с кольцом осуществляется подпружиненными пальцами 4. Диск получает быстрое, а кольцо медленное движение в одном направлении. Кольцо 2 непрерывно медленно вращается и увлекает за собой ролики 1, которые, перекатываясь, заклиниваются в угловом пазу между кольцом и диском 3, который получает таким образом медленное вращение. При этом можно сообщить быстрое вращение валу, несущему диск 3, который, обгоняя кольцо 2, расклинивает ролики 1.
Муфты обгона используют в токарных, многорезцовых, сверлильных и других станках для передачи рабочих и ускоренных движений, а также для ручной подачи и других целей.
Разница между энергией электрического поля и энергией магнитного поля примерно такая же, как между энергией,…
Когда-то легендарный пастух Магнес, нашел природный магнитный камень, притягивающий железо. В последствии этот камень назвали магнетит или магнитный…
В электрических цепях применяются различные способы соединения конденсаторов. Соединение конденсаторов может производиться: последовательно, параллельно и последовательно-параллельно (последнее иногда называют смешанное соединение конденсаторов). Существующие…
Обозначение конденсаторов на схемах определено ЕСКД ГОСТ 2.728-74. Обозначения условные графические в схемах. Резисторы, конденсаторы. Итак,…
Узнав, что же такое конденсатор, рассмотрим, какие бывают виды конденсаторов. Итак, виды конденсаторов можно классифицировать по…
Вся энергия заряженного конденсатора сосредотачивается в электрическом поле между его пластинами. Энергию, накопленную в конденсаторе, можно определить…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}