Позиционные УЧПУ объединяют большую группу устройств, предназначенных для управления установочными перемещениями рабочих органов в объекте управления, как правило, с высокой точностью. Ввиду многообразия объектов управления с решением аналогичных задач управления позиционные УЧПУ строят по агрегатному принципу, что позволяет на единой функциональной, схемной, конструктивной основе выпускать различные УЧПУ с заданным набором функций, необходимых для управления конкретным объектом, причем исключая или модифицируя некоторые узлы и их функции. Это дает возможность более полно использовать заложенные функциональные возможности в УЧПУ и исключить узлы, функции которых при управлении данным объектом не используются (борьба с избыточностью аппаратной структуры).
В позиционных УЧПУ предусматриваются следующие модификационные различия: разновидности измерительных систем и вид интерфейса, обслуживающего их, способы ввода УП, способы ввода и вид коррекции и ее адресация при вводе, типы применяемых приводов, объем и наличие постоянной оперативной памяти и т. д.
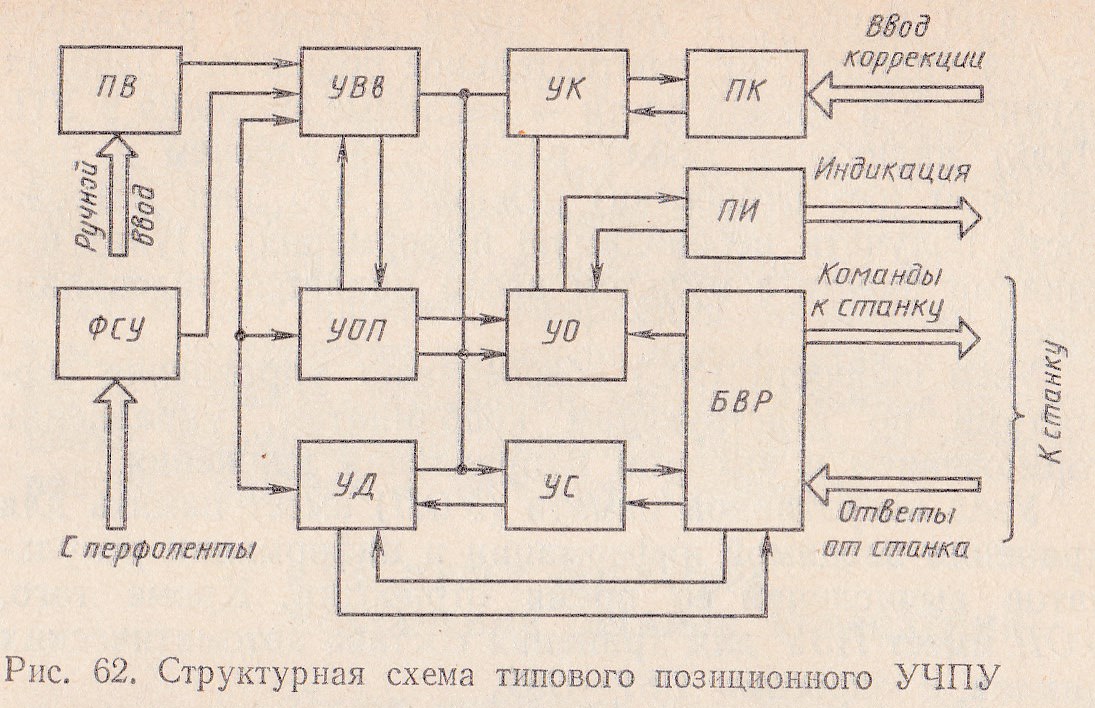
 На рис. 62 представлена структурная схема типового позиционного УЧПУ. Это устройство включает в себя следующие узлы: фотосчитывающее устройство (ФСУ), предназначенное для ввода управляющей программы с перфоленты; пульт ввода (ПВ), который предназначен для ввода УГ1 с помощью клавиатуры, а также для назначения режимов работы, подачи разовых команд и индикации контроля состояния устройства; узел ввода (УВв), который обеспечивает выбор режима ввода, режим управления станком и устройством, вызов автоматических циклов по специальной команде G80 с встраиванием в циклы фактических параметров, управление лентопротяжным механизмом в старт-стопном режиме во время отработки УП и управление перемоткой ленты в начало программы, расшифровку адресов команд, временное хранение их содержимого и ввод в соответствующие регистры памяти содержимого команд по расшифрованному адресу. Кроме того, данное устройство управляет лентопротяжным механизмом во время поиска N кадра, заданного на переключателе (NП).
На рис. 62 представлена структурная схема типового позиционного УЧПУ. Это устройство включает в себя следующие узлы: фотосчитывающее устройство (ФСУ), предназначенное для ввода управляющей программы с перфоленты; пульт ввода (ПВ), который предназначен для ввода УГ1 с помощью клавиатуры, а также для назначения режимов работы, подачи разовых команд и индикации контроля состояния устройства; узел ввода (УВв), который обеспечивает выбор режима ввода, режим управления станком и устройством, вызов автоматических циклов по специальной команде G80 с встраиванием в циклы фактических параметров, управление лентопротяжным механизмом в старт-стопном режиме во время отработки УП и управление перемоткой ленты в начало программы, расшифровку адресов команд, временное хранение их содержимого и ввод в соответствующие регистры памяти содержимого команд по расшифрованному адресу. Кроме того, данное устройство управляет лентопротяжным механизмом во время поиска N кадра, заданного на переключателе (NП).
Пульт коррекции (ПК) предназначен для набора и хранения коррекции по предусмотренным адресам. Узел коррекции (УК) обеспечивает последовательное считывание цифровой информации, установленной на переключателях, ввод считываемой информации с нормализацией по запросам в управляющую программу в соответствующие адреса (адреса инструментов или координат).
Пульт индикации (ПИ) обеспечивает индикацию информации по задействованным адресам (построчно или по страницам) и представляет собой электронно-лучевую трубку, в левой части которой растровые строки индицируют действительное положение рабочих органов, а в правой части — заданные значения в УП. Пульт индикации может работать в рабочем и проверочном (без отработки) режимах, что дает возможность получать необходимую информацию. Пульт индикации вместе с пультом ввода является видеомонитором.
Узел скорости (УС) обеспечивает управление скоростями по действующим координатам, управление торможением и выбором направления движения.
Узел оперативной памяти (УОП) имеет память для хранения вводимой информации и информации результатов вычислений во время отработки. Кроме того, УОП имеет ПЗУ для хранения состава автоматических циклов с адресами G81—G89.
Узел обслуживания (УО) представляет собой специализированный микропроцессор (вычислитель), который выполняет обработку геометрической информации, т. е. вычисление угла рассогласования по всем управляемым координатам с использованием пяти аргументов, которые могут влиять на расчеты угла рассогласования (заданное значение перемещения по координате, действительное положение рабочего органа по координате, коррекция режущего инструмента, коррекция положения рабочего органа и смещение вторичное или третичное по данной координате). Вычисленное значение угла рассогласования в каждом цикле сравнивается с заданными установками (числами) для выбора соответствующей скорости движения (ускоренный ход, одна из скоростей, торможение). Кроме того, данное устройство формирует сигналы тактирования для синхронизации работы всех устройств (выполняет функции таймера), обеспечивает управление пультом индикации.
Узел датчиков (УД) предназначен для преобразования сигналов датчиков положения в код УЧПУ, питания датчиков и усиления сигналов.
Блок внешних разъемов (БВР) представляет собой стандартный интерфейс (называется совокупность правил алгоритмов, временных сообщений, аппаратных средств подключения, с помощью которых идет обмен информации между различными устройствами) в виде адаптера или микроконтроллера, который обеспечивает связь УЧПУ с электроавтоматическими устройствами станка и управление ими. БВР предназначен для расшифровки, формирования и распределения сигналов управления группы SМТ на соответствующие исполнительные механизмы, сбора и хранения информации состояния объекта (фотографирование состояния объекта), хранения поступающих заявок на исполнение, анализа поступающей информации по заявкам и ответам, распределения заявок по приоритетам и формирования сигналов прерываний, запрета и заявок на исполнение, формирования сигналов индикации состояния рабочих органов и сигналов готовности.
