Наибольшее распространение имеют четыре типа сечений направляющих прямолинейного движения:
- прямоугольные (рис. 1, а)
- треугольные (призматические) (рис. 1, б)
- трапециевидные (ласточкин хвост) (рис. 1, в)
- круглые (рис. 1, г),
- комбинированные из перечисленных.
Эти сечения могут иметь охватывающую и охватываемую формы.
В зависимости от нагрузки, скорости, типа смазки и масло-распределения направляющие движения подач могут работать в режимах граничного, смешанного трения и трения со смазкой.
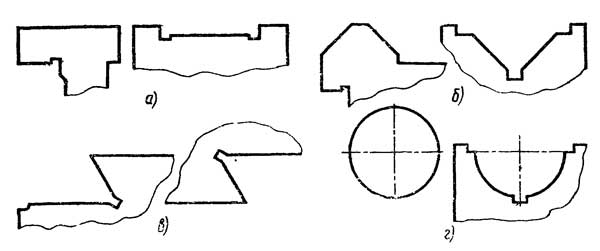
Рис. 1. Типы направляющих скольжения
При самых малых скоростях движения (до 50…100 мм/мин) направляющие работают в режиме граничного трения. Действующие в стыке нагрузки приводят к разрыву слоя смазки, возникновению трения без смазки возрастанию сопротивления силе тяги и, как следствие, возникновению скачкообразного движения.
При более высоких скоростях в направляющих возникает смешанное трение. Оно характеризуется тем, что на подвижный узел действует гидродинамическая подъемная сила, которая воспринимает часть нагрузки, но не обеспечивает полного разделения слоем смазки поверхностей трения. При смешанном трении необходимо различать коэффициент трения ft покоя и меньший по величине коэффициент трения fv движения.
Коэффициент трения покоя в паре чугун-чугун 0,21…0,28 при обычных маслах, а при антискачковом масле ИНС снижается до 0,075…0,09, в паре фторопласт — чугун 0,04…0,06. Разность коэффициентов трения покоя и движения Δf = ft — fv, для традиционных материалов (сталь, чугун) и обычных масел в среднем Δf = 0,09.
Погрешность остановки узла определяется зависимостью:
Δ = (1÷2) (ΔТ/jпр) = (1÷2) (ΔfN/jпр),
где ΔТ — разность сил трения покоя и движения, Н; N- нормальная нагрузка, Н; jпр — жесткость привода, Н/мкм. Для пар чугун-чугун, чугун-сталь при массе узла 1000 кг и жесткости привода 100-150 Н/мкм погрешность остановки может достигать 0,01-0,02 мм. Уменьшение погрешности остановки узлов до 1 — 3 мкм и неравномерности медленных движений могут быть достигнуты за счет сокращения разности коэффициентов трения покоя и движения и устранения зазоров в передаче движения и повышения жесткости привода подач. Первое направление реализуется при использовании специальных материалов для направляющих и антискачковых смазок, перехода на гидростатические направляющие и направляющие качения. Второе связано с применением в конструкции приводов подач коротких беззазорных кинематических цепей.
