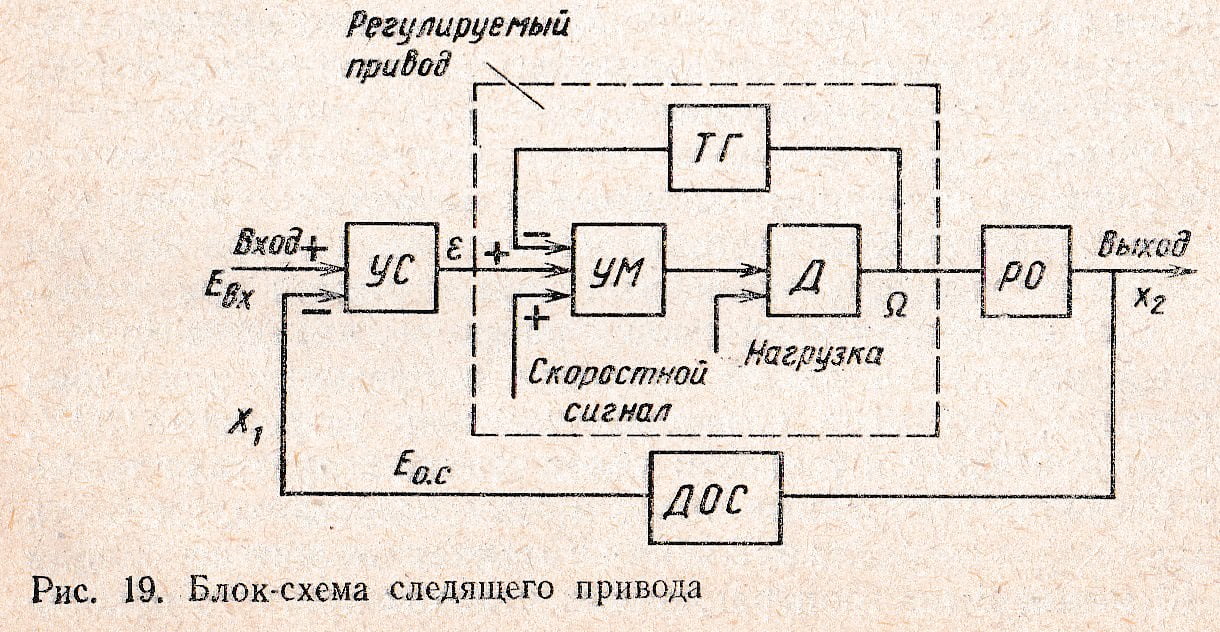
Следящий привод СП (рис. 19) состоит из двигателя Д (гидравлического, электрического) необходимой мощности, усилителя мощности УМ, снабжающего этот двигатель энергией, регулируемой в широких пределах, датчика обратной связи по положению ДОС, преобразующего фактическое положение Х2 (или угол поворота) рабочего органа Р0 в электрический сигнал ЕО.С. строго пропорциональный этому положению, и сравнивающего устройства УС, которое сравнивает сигнал ДОС с входным управляющим сигналом ЕВХ (или Х1). При неравенстве этих сигналов, т. е. фактического положения Х2 с заданным Х1 сигнал ошибки е заставляет вращаться двигатель со скоростью Ω, пропорциональной этому сигналу в достаточно широких пределах. Обратная связь по скорости, осуществляемая тахогенератором ТГ, обеспечивает точность управления, снижая зону нечувствительности и влияние различного типа нелинейностей, а также увеличивает жесткость механической характеристики привода.
Усилитель мощности и сравнивающее устройство содержат корректирующие звенья, которые служат для обеспечения необходимых динамических свойств привода. Мощные усилители, в качестве которых чаще всего используют управляемые тиристорные преобразователи переменного тока в постоянный (в случае применения электродвигателей) или золотниковые устройства того или иного типа (в случае применения гидродвигателей), как правило, содержат в своем составе маломощный усилитель постоянного тока (УПТ) с большим коэффициентом усиления по напряжению, через который замыкается обратная связь по скорости.
Привод подач является одним из основных узлов, определяющих производительность и точность станков с ЧПУ. Система ЧПУ позволяет практически безынерционно сформировать сигналы управления приводом, обеспечивающие движение по заданной координате. Все большее значение приобретает совершенствование параметров исполнительного двигателя и схемы управления им с учетом кинематической цепи привода. В станочных СП наибольшее применение нашли электродвигатели постоянного тока и гидравлические двигатели (двигатели переменного тока в СП станков пока находят ограниченное применение). Частота вращения электродвигателей постоянного тока обычно не превышает 3000 об/мин при напряжении 220 В. Недостатком их является наличие щеток и коллектора, служащих для подвода рабочего тока в обмотку якоря. Электродвигатели серии ПБСТ содержат встроенный тахогенератор с большим числом коллекторных пластин (96), что снижает пульсации напряжения на малых скоростях.
Для электродвигателей постоянного тока характерна высокая линейность внешних регулировочных характеристик при управлении за счет изменения напряжения на якоре, что обеспечивает постоянный момент на любой скорости в пределах диапазона регулирования. По мере совершенствования устройств ЧПУ, увеличения жесткости и точности узлов станка возрастали требования к величине ускоренных ходов и быстродействию. Скорость ускоренных ходов возросла от 5 м/мин в станках второго поколения до 10—12 м/мин в многооперационных станках третьего поколения. При этом жесткость механических узлов должна допускать ускорения 0,3—0,5 g. Для обеспечения высокой точности обработки величина дискреты уменьшена во многих случаях до 1 мкм.
Разработаны несколько модификаций электродвигателей постоянного тока: малоинерционные электродвигатели типа ПГ с якорем малого диаметра, но большой длины, высокомоментные тихоходные электродвигатели с постоянными магнитами без обмоток возбуждения, двигатели с плоским печатным якорем и т. д.
Малоинерционные электродвигатели с тиристорными преобразователями обладают высокими скоростями. Этот электродвигатель имеет высокое быстродействие, но требует установки беззазорного редуктора и настройки усиления применительно к параметрам каждого станка, имеет малый диаметр и отсюда малую перегрузочную способность, малую теплоемкость. Поэтому малоинерцнонные электродвигатели постоянного тока заменены низкооборотными электродвигателями, имеющими высокие моменты инерции.
