Принцип построения и структура. С целью пояснения основного принципа построения систем автоматического регулирования рассмотрим следующую техническую задачу. Пусть требуется обеспечить постоянную частоту вращения двигателя постоянного тока с независимым возбуждением. Частота вращения двигателя Ω = UЯ/(cеФ) — rЯМ/(cеcМФ2), где UЯ —напряжение в цепи якоря двигателя; cе, cМ — конструктивные постоянные; Ф — магнитный поток, создаваемый обмоткой возбуждения двигателя; rЯ — сопротивление цепи якоря двигателя; М — момент на валу двигателя.
Изменения момента нагрузки на валу двигателя вызывают изменение частоты его вращения. Для поддержания постоянной частоты вращения при изменении момента нагрузки на валу двигателя необходимо изменить либо сопротивление rЯ, либо величину магнитного потока Ф, либо напряжение (UЯ в цепи якоря. Условимся, что будем изменять напряжение в цепи якоря путем перемещения ползунка потенциометра П.
Ручное регулирование (рис. 25, а) осуществляют в такой последовательности:
- измеряют фактическую частоту вращения двигателя Ω с помощью, например, тахометра;
- сравнивают ее текущее значение с заданной частотой вращения Ω3, т. е. определяют отклонение частоты вращения;
- ползунок потенциометра перемещают таким образом, чтобы фактическая частота вращения совпала с заданной.
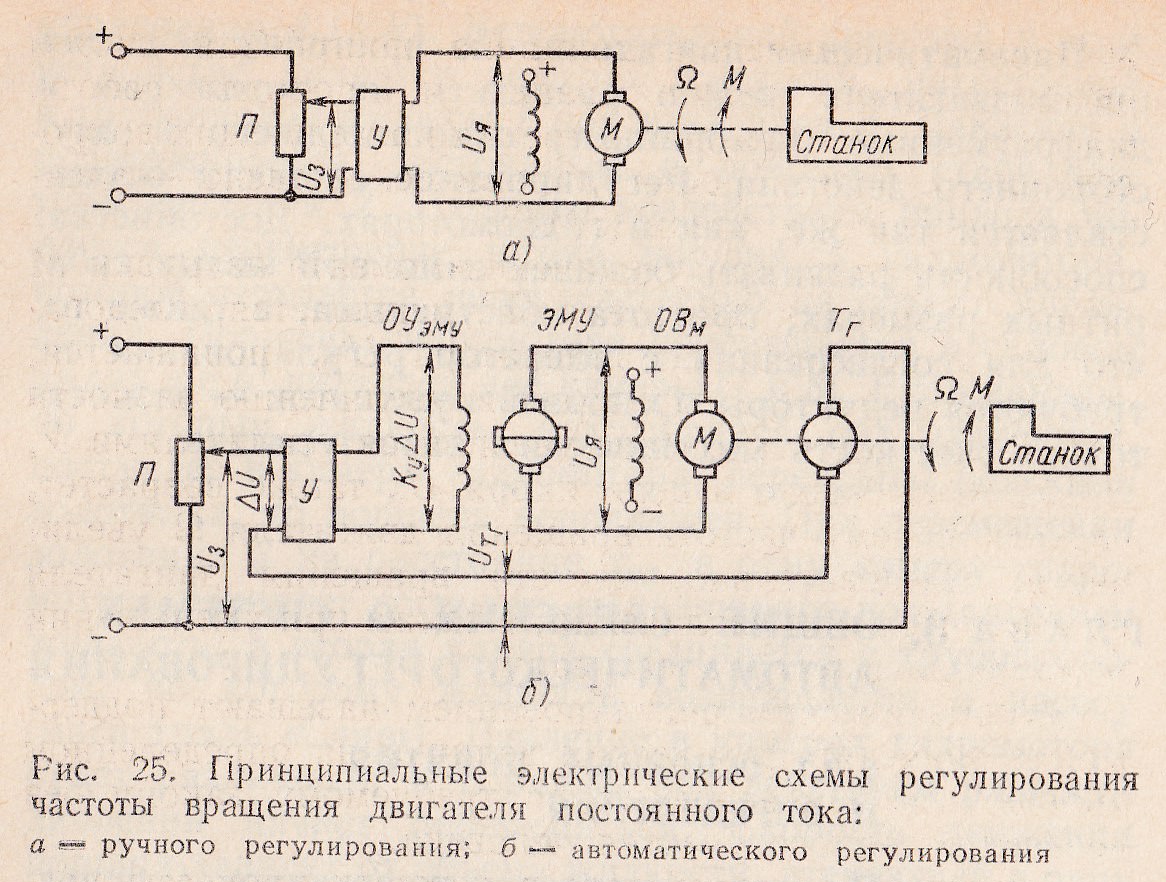
Можно исключить человека из процесса регулирования путем применения автоматической системы (рис. 25, б).
- Тахогенератором постоянного тока Тг измеряют фактическую частоту вращения двигателя.
- На входном сопротивлении усилителя У задающее напряжение UЗ, которое является функцией заданной частоты вращения, сравнивается с напряжением тахогенератора UТг, пропорциональным фактической частоте вращения двигателя М. При отклонении частоты вращения двигателя разность ∆U = UЗ — UТг, поступающая на усилитель, изменяется.
- Напряжение КY∆U с выхода усилителя поступает на обмотку управления ОУЭМУ электромашинного усилителя ЭМУ, усиливается в kЭМУ раз и подается на обмотку якоря двигателя М. Следовательно, частота вращения двигателя будет изменяться так, что уменьшается ее отклонение от заданного значения.
Следует отметить, что в современных электроприводах станков наиболее широкое применение находят тиристорные преобразователи. Для наиболее доступного понимания принципа построения систем автоматического регулирования и простоты работы с данной схемой при рассмотрении последующих вопросов введем более простое динамическое звено — электромашинный усилитель (ЭМУ).
Например, при увеличении момента нагрузки М частота вращения двигателя Ω уменьшается, следовательно, напряжение тахогенератора (UТг понижается, что, в свою очередь, приводит к увеличению разности ∆U. Возросшее отклонение увеличится усилителями У, ЭМУ, напряжение в цепи якоря UЯ также возрастет, благодаря чему частота вращения двигателя Ω увеличится. Следовательно, частота вращения двигателя не изменится при увеличении, а также при уменьшении момента нагрузки на его валу.
Автоматическим регулированием называют поддержание значений физических величин на определенном уровне или изменение их по требуемому закону без непосредственного участия человека.
Технические устройства, в которых процессы подлежат автоматическому регулированию, называют объектами регулирования.
Физические величины, подлежащие регулированию, называют регулируемыми величинами.
Внешние воздействия, вызывающие отклонение регулируемой величины от ее заданного значения, называют возмущающими воздействиями.
Технические устройства, предназначенные для автоматического регулирования различных величин в объектах, называют автоматическими регуляторами.
Система автоматического регулирования состоит из двух основных частей — объекта регулирования и автоматического регулятора.
В рассмотренном выше примере объектом регулирования является двигатель постоянного тока; регулируемой величиной — частота вращения двигателя; возмущающим воздействием — момент нагрузки на валу двигателя; автоматическим регулятором — потенциометр, усилитель, электромашинный усилитель, тахогенератор.
Функциональные схемы. Система автоматического регулирования представляет собой сложные комплексы взаимодействующих технических средств, узлов и элементов, работа которых основана на различных физических принципах (электрических, механических, гидравлических и др.). Они разнообразны по конструктивному исполнению и техническим характеристикам. Однако в теории автоматического регулирования основное внимание уделяется не техническим свойствам отдельных элементов, а их функциональным преобразованиям и характеру связей между ними. Наглядное представление об этом дают функциональные схемы систем автоматического регулирования.
Функциональные схемы отражают взаимодействие устройств, элементов систем автоматического регулирования в процессе их работы. Графически отдельные устройства систем автоматического регулирования изображают в виде прямоугольников, а существующие между ними связи — стрелками, соответствующими направлению прохождения сигнала. Внутреннее содержание каждого устройства не конкретизируется, а функциональное назначение шифруется буквенными символами.
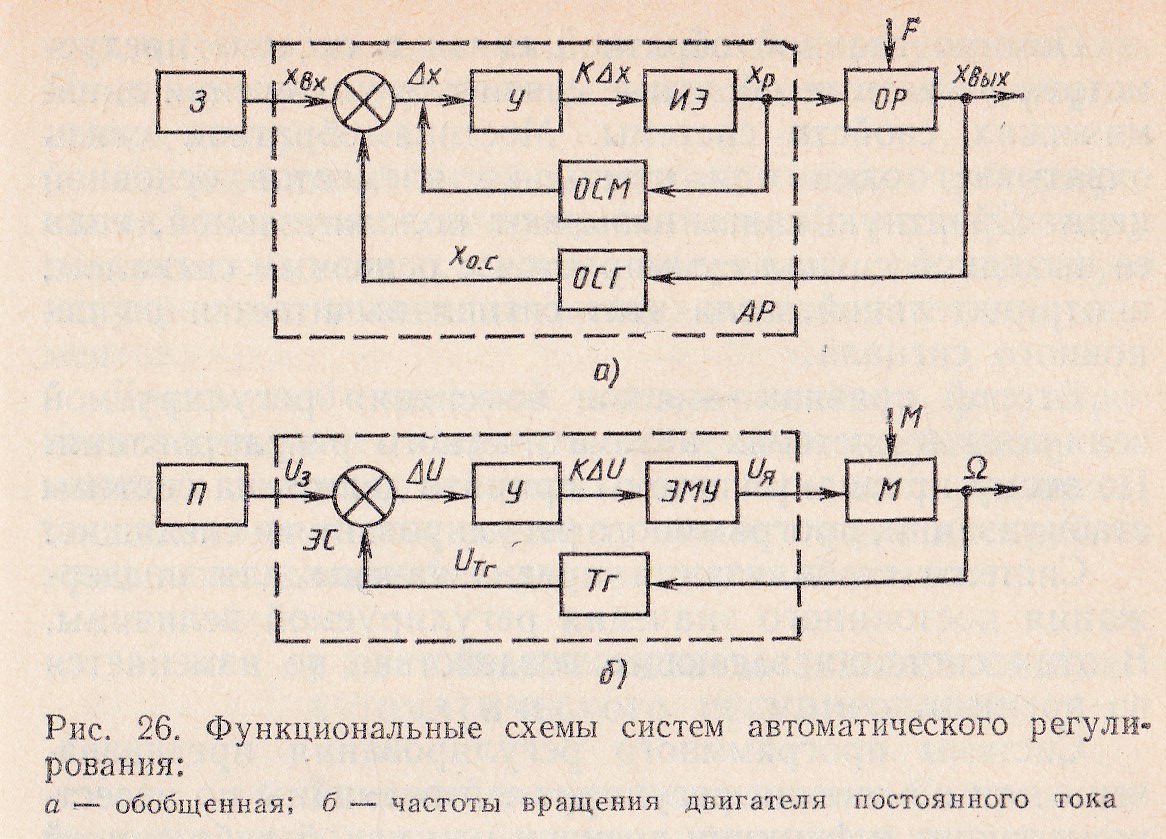
Большое разнообразие элементов, входящих в различные системы автоматического регулирования, может быть сведено к нескольким основным типам, различающимся по назначению и взаимодействию в системе автоматического регулирования. Следовательно, можно говорить о типовой (или обобщенной) функциональной схеме системы автоматического регулирования (рис. 26, а).
На объект регулирования ОР, находящийся под влиянием внешнего возмущающего воздействия Г, поступает управляющее воздействие хP, которое является выходной величиной автоматического регулятора (АР), представляющего собой совокупность элементов. В автоматический регулятор по цепи главной обратной связи (ОСГ) поступает регулируемая величина хВЫХ. Входная величина хВХ с задатчика 3 поступает на элемент сравнения (ЭС). Сигнал ошибки, представляющий собой разность входной величины хВХ и сигнала главной обратной связи хO.С (∆х = хВХ — хO.С), поступает на усилитель У, где усиливается в К раз и воздействует на исполнительный элемент (ИЭ), выходной сигнал хР которого является регулирующим воздействием автоматического регулятора. Элемент местной обратной связи (ОСМ) вводится в систему автоматического регулирования для улучшения ее динамических свойств.
Функциональная схема системы автоматического регулирования частоты вращения двигателя постоянного тока показана на рис. 26, б.
Классификация систем. Вследствие большого разнообразия используемых в технике систем автоматического регулирования, различающихся функциональными возможностями, принципами построения и формой конструктивной реализации, невозможно дать единую классификацию систем автоматического регулирования. Поэтому рассмотрим наиболее характерные классификационные признаки.
Первый признак — наличие в системах явно выраженной обратной связи. По этому признаку системы разделяют на разомкнутые и замкнутые. Замкнутые системы содержат цепь главной обратной связи ОСГ (см) рис. 26, а), в разомкнутых системах она отсутствует.
Системы, работающие по разомкнутому циклу, используют только в качестве составной части более сложных систем автоматического регулирования. Под главной обратной связью понимают подачу части энергии с выхода системы на ее вход. Главная обратная связь (ОСГ) служит для сравнения действительного закона изменения регулируемого параметра с требуемым.
Помимо главной обратной связи в системе предусмотрены местные обратные связи для улучшения динамических свойств системы. Местная обратная связь охватывает один или несколько элементов основной цепи. Обратную связь называют положительной, если ее выходной сигнал суммируется с основным сигналом, и отрицательной, если этот сигнал вычитается из основного сигнала.
Второй признак — закон изменения регулируемой величины в системах автоматического регулирования. По этому признаку системы принято делить на системы стабилизации, программного регулирования и следящие.
Системы стабилизации предназначены для поддержания постоянного значения регулируемой величины. В этих системах задающее воздействие не изменяется во времени.
Системы программного регулирования предназначены для изменения регулируемой величины по известному закону в функции времени или какой-либо другой величины. Задающее воздействие называют программой регулирования.
Следящие системы предназначены для изменения регулируемой величины по заранее неизвестному закону. Задающее воздействие представляет собой случайную функцию времени.
Третий признак — способность системы автоматического регулирования поддерживать с определенной степенью точности значение регулируемой величины. По этому признаку системы разделяют на статические и астатические.
Статической системой автоматического регулирования называют такую систему, в которой принципиально невозможно поддерживать одно и то же значение регулируемого параметра при условии, что задающее воздействие системы остается неизменным. Остаточную ошибку в такой системе называют статизмом.
Астатической системой автоматического регулирования называют такую систему, в которой в установившемся режиме регулируемый параметр принимает всегда одно и то же значение и не зависит от значения возмущающего воздействия на объект регулирования. В астатической системе статизм всегда равен нулю.
Четвертый признак — функциональная связь между входными и выходными величинами элементов, входящих в состав системы автоматического регулирования. По этому признаку системы подразделяют на непрерывные и дискретные.
Непрерывной системой автоматического регулирования называют систему, в которой непрерывному изменению входных величин элементов соответствует непрерывное изменение выходных величин этих элементов.
Дискретной системой автоматического регулирования называют систему, в которой непрерывному изменению входной величины хотя бы одного элемента, входящего в состав системы, соответствует дискретное изменение выходной величины этого элемента.
