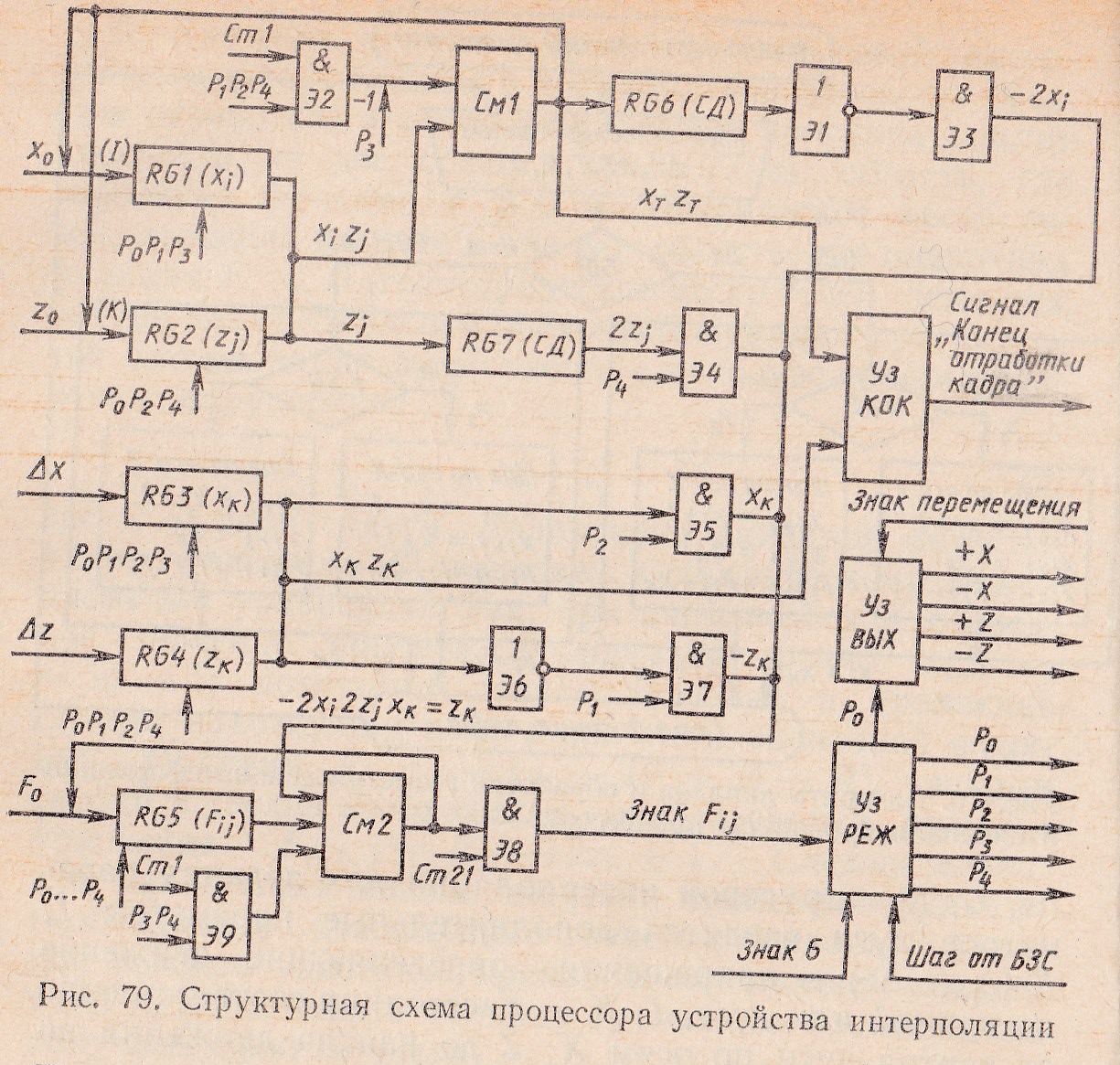
Для расчета траектории движения методом линейно-круговой интерполяции может применяться специализированное арифметико-логическое устройство — интерполятор (рис. 79). Процессор интерполятора включает в себя: рабочие регистры RG1—RG5, предназначенные для хранения исходных данных и полученных результатов вычислений (xi, zj, хк, zk, Fij); сдвиговые регистры RG6, RG7, предназначенные для получения удвоенного значения текущих координат xizj, т. е. определения 2xi, 2zj, сдвигом влево засылаемого числа на один разряд. Кроме того, данные регистры задерживают информацию на один цикл вычисления, так как данные числа участвуют в операциях в следующем вычислительном цикле.
В процессор интерполятора входит сумматор (См1), предназначенный для вычисления текущих координат, а также сумматор (См2), предназначенный для вычисления значения оценочной функции. Логические элементы Э1—Э9 служат для развязки узлов процессора в различных режимах работы. В процессор входят также три выходных узла:
- узел режимов (УзРЕЖ) обеспечивает выработку сигналов необходимого режима на основании анализа значений G, Fij;
- узел «Коней отработки кадра» (УзКОК) выполняет анализ (сравнение) кодов текущей и конечной координаты и на основании анализа подготовляет или вырабатывает сигнал КОК;
- узел выхода (УзВЫХ) формирует знак перемещения с учетом записи знака перемещения в программе и знака перемещения по заявке с пульта оператора.
 Работа процессора происходит по следующему алгоритму. По сигналу переписи в нулевом режиме (Р0) происходит перезапись информации из буферных регистров в рабочие, а также очищение регистра РG5 (оценочная функция равна нулю в начале УП или кадра). После этого выполняется анализ введенной информации, на основании которого вырабатывается один из рабочих режимов. Если анализ дал результат G01, F≥ 0, то вырабатывается режим Р1, при котором совершается шаг по оси X, и процессор производит следующее вычисление: содержимое RG1 суммируется с единицей в См1, где единица поступает через клапан Э2, и результат суммирования перезаписывается в RG1, т. е. вычисляется новое значение координаты х. Кроме того, полученное значение (хi+1 текущая координата) в См1 подается в узел КОК, где происходит поразрядное сравнение с содержимым регистра RGЗ через клапан Э5 для выработки или подготовки сигнала КОК. Одновременно содержимое RG5 (текущее значение оценочной функции) подается в См2, где происходит сложение с содержимым RG4 через клапан Э7. Результат операции перезаписывается в RG5. Значение операции в См2 проверяется по знаку для выработки очередного режима (знак операции проверяется 21-м стробом, т. е. после завершения операции вычисления).
Работа процессора происходит по следующему алгоритму. По сигналу переписи в нулевом режиме (Р0) происходит перезапись информации из буферных регистров в рабочие, а также очищение регистра РG5 (оценочная функция равна нулю в начале УП или кадра). После этого выполняется анализ введенной информации, на основании которого вырабатывается один из рабочих режимов. Если анализ дал результат G01, F≥ 0, то вырабатывается режим Р1, при котором совершается шаг по оси X, и процессор производит следующее вычисление: содержимое RG1 суммируется с единицей в См1, где единица поступает через клапан Э2, и результат суммирования перезаписывается в RG1, т. е. вычисляется новое значение координаты х. Кроме того, полученное значение (хi+1 текущая координата) в См1 подается в узел КОК, где происходит поразрядное сравнение с содержимым регистра RGЗ через клапан Э5 для выработки или подготовки сигнала КОК. Одновременно содержимое RG5 (текущее значение оценочной функции) подается в См2, где происходит сложение с содержимым RG4 через клапан Э7. Результат операции перезаписывается в RG5. Значение операции в См2 проверяется по знаку для выработки очередного режима (знак операции проверяется 21-м стробом, т. е. после завершения операции вычисления).
Если после очередного анализа в блоке режимов выявлены признаки G01, F <0, то узел режимов вырабатывает режим Р2. В данном режиме будет происходить шаг по оси Z и процессор выполняет следующие операции: содержимое RG2 суммируется с единицей в См1, и результат вычисления перезаписывается в RG2. Полученное новое значение координаты в См1 подается в узел КОК, где происходит поразрядное сравнение с содержимым RG4 для подготовки или выработки сигнала КОК. Содержимое RG5 в См2 складывается с содержимым RGЗ (хK), и результат перезаписывается в RG5. Через клапан Э8 проверяется в См2 знак вычисленной оценочной функции для выработки очередного режима.
Если после очередного анализа в блоке режимов выявлены признаки G02 (G03), F≥ 0, то вырабатывается режим Р3. В данном режиме происходит шаг по оси X, и процессор выполняет следующие операции-содержимое суммируется с минус единицей в См1 и результат перезаписывается в RG1 (хi + 1); содержимое См1 сравнивается с содержимым RGЗ, где хранится хK для подготовки или выработки сигнала КОК. Содержимое RG5 суммируется с содержимым сдвигового регистра RG6 и единицей в См2 и перезаписывается в RG5. Содержимое См2 через клапан Э8 проверяется на знак оценочной функции для выработки очередного режима.
Если после очередного анализа в блоке режимов выявлены признаки G02 (GОЗ), F <0, то вырабатывается режим P4. В данном режиме будет шаг по оси Z и процессор выполняет следующие операции: содержимое RG2 суммируется с единицей в См1 и результат перезапишется в RG2; содержимое См1 сравнивается с содержимым RG4 для подготовки или выработки сигнала КОК. Кроме того, содержимое RG5 в См2 складывается с содержимым RG7 (сдвиговый регистр) и единицей и результат перезаписывается в RG5; содержимое См2 (знак оценочной функции) проверяется через Э8 в узле режимов для выработки очередного режима.
После отработанного запрограммированного участка в узле «конец отработки кадра» вырабатывается сигнал КОК, который вызывает ввод информации очередного кадра и прекращение отработки по предыдущему кадру.
